Accomplishments
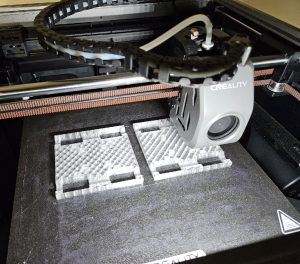
With the arrival of the ordered parts, I switched gears to 3D printing the STL files we had on hand. As the original XY robot was designed for drawing images converted to GCODE, it was necessary to create a mount that would hold a standard plastic cup rather than a pen or pencil. I quickly ordered some PETG plastic filament at the recommendation of my roommate who owns his own 3D printer, and got to printing the parts. As a bonus, PETG is recyclable!
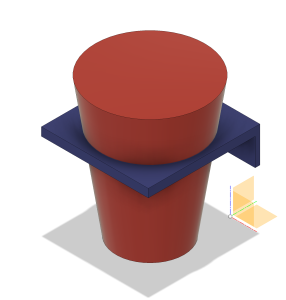
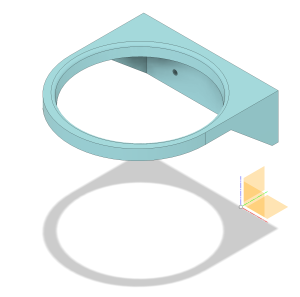
By inspecting the stl file for the pen mount, I could determine the screw hole diameters and width between them, so that I could replicate the screw holes in a new mount. I created a rough cone component that captured the general shape of a standard plastic cup, and performed a join cut to create the opening in the part. After some additional cleanup and adding some structural support, I was left with the final part. The cup should be held above the table by around ~10mm, but if too high or too low, it should be easy to move the screw holes and adjust.
Progress
With all of the parts printed, assembly will properly begin next week. I intend to follow the original guide and ensure that it works before replacing parts with our custom pieces. Once this is done, I will look into generating GCODE that tells the XY robot to move the holder to a specific location.