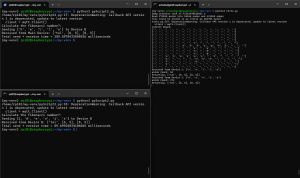
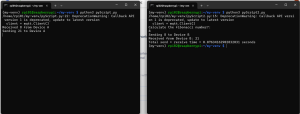
For verification right now, we are each testing our individual subsections, with a regression model of testing. For example, with our networked devices, we began by sending the most basic of packages, and ensuring that it was being received. Then, we began working on two way communication, having device A send data to Device B, having Device B manipulate it and then sending it back to Device A. Then we would build to having multiple devices networked, with a main device operating as a broker. Now the packets contain IDs of the device that the message is addressed too, and our receiving devices interpret these packets to determine if they are for them.
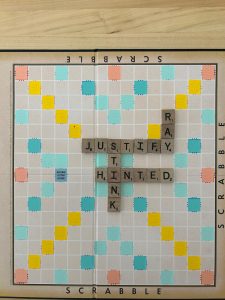
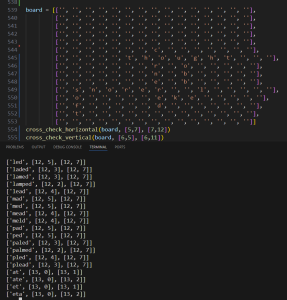
In terms of validation, once we integrate all our subsystems, we plan on tracing a picture taken with the RPi Camera through our system as it gets translated into a 2D array, validates words and calculates score as well as outputting the result to the main LCD display. We will manually check along the way through print statements that the board is updated properly. Additionally, we plan on testing the system in various lighting scenarios to ensure that the ring light is sufficient for proper lighting of the board and tiles.
In our design report, we mentioned having a focus group of individuals play Scrabble with Scrabbletron so we can determine whether our updates really improve the Scrabble playing experience. We plan on running this study once we have a working system after integration.