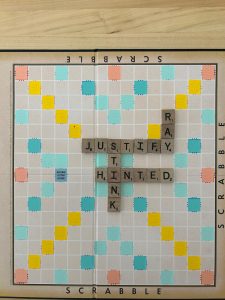
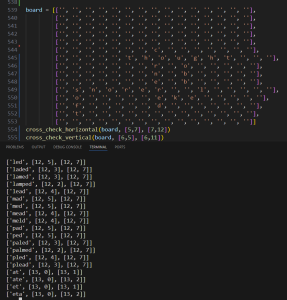
Last week, I finished up the hint logic, fixing some of the last little bugs as well as generalizing the algorithm to the vertical direction. Denis is now able to run the hint logic on the main RPi and can send receive hints with the RPi0s.. Also, I set up the gooseneck camera mount. I laser cut a platform (rectangle with four holes in it so that I could zip tie it to the top of the camera mount we bought). I then was able to clip the ring light onto the platform. The RPi and RPi camera rest on the platform and the camera is looped through the ring light. The picture below is what the mount + platform looks like (without the RPi on it). The other picture is what I took from my phone camera. Just from that, we can see how the ring light really helps eliminate shadows that we were seeing before.
Last week, I wrote a preliminary scoring function where letter and word multipliers are taken into account (but haven’t tested it yet). This upcoming week, I plan on testing the scoring function as well as writing the function that takes in the newly placed tiles and validates/scores all the newly created words.
After this week, I feel more confident that we are running on schedule, but we must not let up and finish strong this last month of the semester.