
This week I worked on finalizing the parts required for the project alongside the rest of the team. I particularly focused on the embedded / electronic parts in addition to the vision component. Past that, I have been working on the data-loader that compiles the datasets for fine-tuning the model. The fine-tuning itself will happen this week.
John’s Status Report for February 22nd, 2025
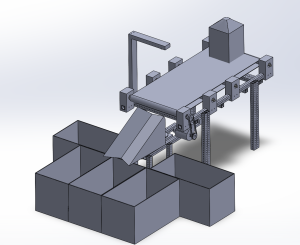
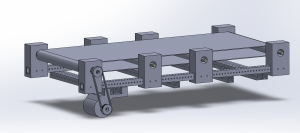
This week, I finished up our final draft for our conveyor design on Solidworks shown below. I also worked with the team to organize our parts ordering, so our orders will be submitted next week during Tuesday. Once the parts arrive, we will need to quickly begin assembling and troubleshooting our mechanical design. Considering parts may take a little longer to arrive than expected, our schedule may have to be pushed back by half a week.
Erin’s Status Report for February 15th, 2025
This week, I met with my team to prepare for our upcoming design review presentation. Our goal was to fully think through the separate design aspects of the project, and hash out details. Because we changed our sorting mechanism (described in further detail in the Team Status Report), we had to rethink all the different parts we would require to get the system to function properly. I contributed by creating an in-depth block diagram that highlights all the system interactions. We plan on adding further detail before our design presentation; However, creating the diagram helped us better understand how we wanted our system to function. We’re still on track with the schedule proposed in the Gantt chart. My goals for the following week are to place some integral part orders (Servo, Arduino, Camera) and to also start experimenting with servo libraries on the Arduino to figure out how to properly drive a servo rated for a larger than typical load.

Team Status Report for 02/15/2025
Potential Risks and Risk Management
The most significant risks we anticipate for this project are the same as last week. In a nutshell, servo load rating, and mechanical failure are the biggest risks. We do have risk management mechanisms in place, and these were hashed out in the previous team status report.
Overall Design Changes
We made a change to our sorting mechanism. Previously, we chose to have mechanical sweepers that push materials (glass, paper, plastic, metal) into their respective bins. However, after John started designing the conveyor belt, we found this mechanism to be slightly less feasible. Instead, we decided to pivot to using a swivel mechanism wherein all objects fall off the conveyor belt’s end and are then sorted. The sorting is done with a custom ramp that rotates and drops each object off in its appropriate bin. To accommodate the time it takes for the swivel to transport the objects, we will be modifying the object detection sequence. The design changes will be elaborated on in our design report.
Schedule
Currently, there are no major updates to our schedule, however, we have updated it to indicate our progress on ongoing tasks.
Progress Update
As mentioned in Mohammed’s status report, we experimented with a few pre-trained models and settled to use a YOLOv5 implementation. Fine-tuning will be necessary due to the model recognizing trash as recyclable material in addition to miscategorizing other recyclable waste. John’s status report indicates the substantial completion of a majority of our mechanical design, and it will soon be ready for manual assembly.
Applications of Solution
Part A (Written by Erin)
Our product is tailored to ultimately impact the welfare of society through efficient recycling mechanisms. Our research has shown us that a lot of times, batches of recycled items are contaminated with debris causing these items to no longer be eligible for recycling purposes. Through our solution of automated trash sorting, we’ll be able to reduce the amount of recycling that is rendered ineligible and eventually contribute towards cleaner living environments for all. This result is possible due to less trash ending up in landfills, and subsequently fewer contaminants in the air. Good recycling mechanisms will also aid in maintaining resource availability for future generations. Our product is designed to be efficient, and scalable, and we believe that its incorporation into material recovery facilities will help streamline and improve the recycling conundrum that is ever present in our world.
Part B (Written by Mohammed)
A particular societal factor our solution targets is ignorance to recycling requirements and regulations. In many places and cultures, what constitutes recyclable waste is not immediately obvious, which leads to people inappropriately categorizing their trash. Our project reduces the reliance on individual awareness by automatically and efficiently sorting the miscategorized trash. Furthermore, we intend on solving the potential challenge of product accessibility by designing an affordable and scalable system that can be accessed by both the public and private sector. That way, our solution can be deployed in not only wealthy governments and sorting facilities but also relatively poorer ones.
Part C (Written by John)
The economics of our project are kept in check with our requirement of a low cost to prototyping our system. The product will also consist of a lot of off-the-shelf parts so it will be more feasible to connect with suppliers to reasonably assemble our project. The few parts that are custom-made are only custom to lower costs in our prototyping phase, but they can be reasonably fitted with other off-the-shelf parts to ease production. Since this project is meant to be used by larger bodies such as companies and government entities, which are typically more regulated, it will not hold the concerns of wide-spread distribution with other products that would be marketed to individuals and civilian consumers. The use case of the project designates it to be stationary throughout its usage and life cycle, so it would be feasible to distribute and deploy the product to specific facilities in a controlled manner. The product will solely contribute towards the goals of the facilities it is owned by, so there are likely little to no consequences of its use long-term.
John’s Status Report for February 15th, 2025
At the beginning of the week, we have made a substantial design change which is that instead of individual mechanical sweepers, we will instead simply have a single sorter at the end of our conveyor belt that will guide fallen objects into their designated categories.
This week, we made a lot of progress in the mechanical aspects by detailing the design in Solidworks. This solidifies a lot of our ideas on how we will mechanically design our system and gives us a concrete estimate to a lot of the expected materials we will need. We have also designed a lot of the custom parts that we will need manufacture in our project. For this next week, I will quickly need to finish the remaining design and begin ordering parts for manufacturing and assembling.
Mohammed’s Status Report for February 15th, 2025
Aside from working on next week’s presentation, I primarily experimented with different pre-trained models that can be utilized for the project. The two prominent ones were a YOLOv5 model and a vision transformer, though both were trained on similar datasets. Both models seemed to struggle a bit with trash detection as well as false positives for recyclable material. Fine-tuning the models will likely help with that. The fine-tuning data will likely consist of the dataset that the models were trained. We will also use the Trash Annotations in Context (TACO) dataset which consists of a large image collection of labeled trash and recyclable objects, where we will have to condense the latter to the categories we are using for the project (trash, paper, metal, glass, and plastic).
Attached is an image of the YOLOv5 model’s inference result on an image I captured. The aforementioned problems can be seen in the image. Regardless, we will be sticking with a YOLO model as it is easier to fine-tune and can better visualize its predictions.

John’s Status Report for February 8th, 2025
Personal Accomplishments:
I installed Solidworks and researched typical conveyor belt designs. I have begun drafts of the mechanical designs on Solidworks. I communicated with my group a potential design change to change the form factor of our servo actuators to come in from the side and guide the material into its proper bin instead of directly knocking it. However this may come at the cost of speed.
Schedule:
We are currently on track for the mechanical design as I finish up the draft within this next week.
Deliverables:
As I continue designing, the group and I will eventually figure out which (mechanical sweeper) design will fit our requirements the best. I will also need to finish our first drafts and begin prototyping components. We will also need to finish our list of needed materials which is largely reliant on the designs of our mechanical components.
Team Status Report for 08/02/2025
Potential Risks and Risk Management
The most significant risks that we anticipate for this project are:
Servo Load Rating
In our project proposal, we indicated that we expect our system to be able to accurately classify 25’’ diameter, 10-pound objects. Given these conditions, we are uncertain if simple servos will be able to handle this load. In addition to this, timing synchronization will be pivotal for our product to work as expected. To address these risks, we have identified possible alternatives.
- Use a servo rated for higher loads (7kg, 25kg, etc.)
- Implement an additional stabilizer for servo actuation in the conveyor belt design
Mechanical Failure
The conveyor belt breaks or stalls, thus increasing the latency of the system. To address these issues, we have outlined strict prototyping requirements for our initial stages.
- Stress Test System Design
- Place 6 objects of a maximum of 10 pounds onto the belt
- Allow the conveyor system to run at 0.68mph (based on proposal) and check functionality
Overall Design Changes
No significant changes were made to our design. This may change as we solidify our system architecture. We have upcoming goals of completing the CAD Model of the conveyor belt by 09/02/2025, and the entire system design architecture by 11/02/2025.
Schedule
Currently, there are no major updates to our schedule, however, we have updated it to indicate our progress on ongoing tasks.
Progress Update
With a spare NVIDIA Jetson Nano, our team was able to boot up the Jetson successfully. We ran into some issues initially with regard to the system getting overloaded every time we plugged in a USB, however, we were able to quickly get past this by using a 5V 3+A power brick. We were also able to connect the Jetson to WiFi using this Spark Fun guide. For our object detection mechanism, we decided that we would be using a YOLO model, and so we decided to test whether the Jetson could successfully launch an existing program.

Our Jetson Nano successfully running a YOLO Model
In addition to this, we also worked on our parts list, cross-listing items that we needed with the CMU Inventory, and also considering tradeoffs with components that are currently in the inventory vs. other unlisted suppliers.
Erin’s Status Report for February 8th, 2025
Personal Accomplishments
Mohammed and I worked on booting up a spare NVIDIA Jetson Nano that we had. The process was fairly straightforward, from flashing the SD card to creating an account. The only hiccup we encountered during bootup was the plugin of any external device causing the system to shut down. However, we overcame this very easily by using a power supply better rated for the product.
In addition to this, for our project proposal, I created a block diagram to help us efficiently isolate the different aspects of our system architecture, and think of how we were going to implement it ahead of our design review presentation in the coming weeks. I also helped in finding parts for our parts list
Schedule
Currently, we are on track, however, we are approaching milestones in the coming days, including the system architecture design.
Deliverables
My upcoming goals for the coming week include solidifying the parts list, placing orders for essential components, and also working with John to properly hash out the servo actuation mechanism and how it is going to interact with the whole system.
Mohammed’s Status Report for February 8th, 2025
Personal Accomplishments
I worked alongside Erin on a Jetson Nano we had to get familiar with the device setup. Obstacles we faced along the way as mentioned in the team report is our first power brick not supplying enough power, leading to impromptu shutdowns, in addition to the device not supporting Wi-Fi natively. Our accomplishment in that regard was fixing the power issues and successfully setting up a wireless connection. Subsequently, I got a YOLO v3 model working on OpenCV by setting up Anaconda and installing any required dependencies.
Lastly, I worked alongside the rest of the team on refining the project’s design and picking the necessary components that we will be ordering, both from 18500’s inventory and internet listings.
Schedule
We are not behind by much now. The design presentation is coming up in under two weeks, which prompted us to begin finalizing our design choices. We expect to wrap up our project design and the corresponding presentation on time. As we are on track for the design presentation, we also expect to order our parts for prototyping soon.
For my part, I will begin compiling databases for our CV model in addition to finalizing the YOLO version that will go utilized.
Next Week’s Deliverables
I hope to complete the design presentation alongside the group. I also aim to have a compiled dataset on recyclable material for our model to learn off. Finally, I would like to help the team finalize the required parts for us to place the order.