Potential Risks and Risk Management
The most significant risks we anticipate for this project are the same as last week. In a nutshell, servo load rating, and mechanical failure are the biggest risks. We do have risk management mechanisms in place, and these were hashed out in the previous team status report.
Overall Design Changes
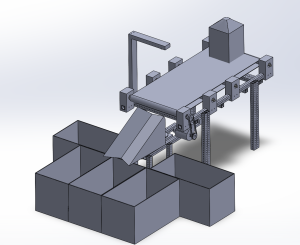
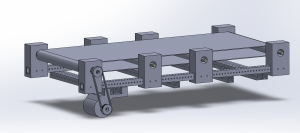
We made a change to our sorting mechanism. Previously, we chose to have mechanical sweepers that push materials (glass, paper, plastic, metal) into their respective bins. However, after John started designing the conveyor belt, we found this mechanism to be slightly less feasible. Instead, we decided to pivot to using a swivel mechanism wherein all objects fall off the conveyor belt’s end and are then sorted. The sorting is done with a custom ramp that rotates and drops each object off in its appropriate bin. To accommodate the time it takes for the swivel to transport the objects, we will be modifying the object detection sequence. The design changes will be elaborated on in our design report.
Schedule
Currently, there are no major updates to our schedule, however, we have updated it to indicate our progress on ongoing tasks.
Schedule – Gantt Chart
Progress Update
As mentioned in Mohammed’s status report, we experimented with a few pre-trained models and settled to use a YOLOv5 implementation. Fine-tuning will be necessary due to the model recognizing trash as recyclable material in addition to miscategorizing other recyclable waste. John’s status report indicates the substantial completion of a majority of our mechanical design, and it will soon be ready for manual assembly.
Applications of Solution
Part A (Written by Erin)
Our product is tailored to ultimately impact the welfare of society through efficient recycling mechanisms. Our research has shown us that a lot of times, batches of recycled items are contaminated with debris causing these items to no longer be eligible for recycling purposes. Through our solution of automated trash sorting, we’ll be able to reduce the amount of recycling that is rendered ineligible and eventually contribute towards cleaner living environments for all. This result is possible due to less trash ending up in landfills, and subsequently fewer contaminants in the air. Good recycling mechanisms will also aid in maintaining resource availability for future generations. Our product is designed to be efficient, and scalable, and we believe that its incorporation into material recovery facilities will help streamline and improve the recycling conundrum that is ever present in our world.
Part B (Written by Mohammed)
A particular societal factor our solution targets is ignorance to recycling requirements and regulations. In many places and cultures, what constitutes recyclable waste is not immediately obvious, which leads to people inappropriately categorizing their trash. Our project reduces the reliance on individual awareness by automatically and efficiently sorting the miscategorized trash. Furthermore, we intend on solving the potential challenge of product accessibility by designing an affordable and scalable system that can be accessed by both the public and private sector. That way, our solution can be deployed in not only wealthy governments and sorting facilities but also relatively poorer ones.
Part C (Written by John)
The economics of our project are kept in check with our requirement of a low cost to prototyping our system. The product will also consist of a lot of off-the-shelf parts so it will be more feasible to connect with suppliers to reasonably assemble our project. The few parts that are custom-made are only custom to lower costs in our prototyping phase, but they can be reasonably fitted with other off-the-shelf parts to ease production. Since this project is meant to be used by larger bodies such as companies and government entities, which are typically more regulated, it will not hold the concerns of wide-spread distribution with other products that would be marketed to individuals and civilian consumers. The use case of the project designates it to be stationary throughout its usage and life cycle, so it would be feasible to distribute and deploy the product to specific facilities in a controlled manner. The product will solely contribute towards the goals of the facilities it is owned by, so there are likely little to no consequences of its use long-term.