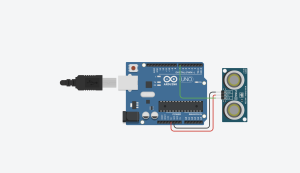
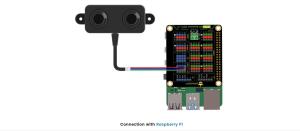
This week we decided to flesh out the overall design for our project and made final decisions regarding the materials that we needed, which led to us submitting our requests for hardware and software. The most significant risk that exists at the current stage of our project would be processing power and latency. We currently have a lot of moving pieces connected to the raspberry pi for our design. Which means it needs to be able to sufficiently supply enough power to each of these pieces as well as respond quickly enough for information sharing. This is why we decided to use a Raspberry PI 4 versus our previous usage of the Raspberry Pi 3A+. It is a lot more capable, but still does not require as much processing power / energy as the Raspberry PI 5. We are also looking into usage of resistors + transistors for managing of power, so that we don’t have too much energy flowing in areas where we don’t need it. Another design change we made was switching from ToF sensors to Ultrasonic sensors. This was due to the fov of the sensors, we wanted to make sure we were able to capture a breadth of information instead of less. We also decided to use a USB microphone, just to simplify the pin out process, and make it easier to connect other pieces. The changes didn’t create a noticeable cost difference as the pieces were around the same price. See below updated block diagram and schedule.
Additional Questions:
Part A: … with respect to considerations of public health, safety or welfare. Note: The term ‘health’ refers to a state of well-being of people in both a physiological and psychological sense. ‘Safety’ is the absence of hazards and/or physical harm to persons. The term ‘welfare’ relates to the provision of the basic needs of people.
By giving bicyclists a hands-free, real-time navigation and blind spot detection system, our solution improves public health, safety, and welfare. Conventional navigation techniques, such as looking up instructions on a phone, can be distracting and raise the risk of accidents. By wirelessly delivering obstacle alerts and directional indications to a vibration-based wristband, our device removes this risk and enables bikers to focus on the road. This improves rider awareness and considerably lowers cognitive overload, which benefits both physical and mental safety. The incorporation of ultrasonic sensors guarantees prompt identification of cars or other objects in blind spots, averting possible collisions and promoting safer interactions between motor vehicles and bicycles.
Furthermore, by promoting safer and more effective cycling, which is an eco friendly and healthful form of transportation, our solution advances public welfare. Our device adds to urban mobility solutions that benefit communities and individuals by increasing bike accessibility through a cheaper navigation tool and lowering the chance of accidents. Accurate route guiding is ensured by the Blues Starter Kit’s GPS tracking and server-based navigation system, which keeps riders from getting lost and lowers stress, both of which can improve general wellbeing. In the end, our product promotes a more secure and safe riding experience, enhancing public safety and encouraging a more sustainable and healthy transportation culture. A was written by Emmanuel.
Part B: … with consideration of social factors. Social factors relate to extended social groups having distinctive cultural, social, political, and/or economic organizations. They have importance to how people relate to each other and organize around social interests.
One important social factor that needs to be considered in regards to the project is the speech component. Specifically, the system will be receiving the user’s destination for their journey via their voice. As a result, different people have different speech intonations in their voice. In the same vein, people speak in different languages. For the scope of the project, we are solely focusing on ensuring the speech recognition and the audio response is functional primarily for English speakers. To handle different speech tones, we are using the Google Speech-to-Text AI system to handle this as it is optimized to identify a variety of speech types. B was written by Akintayo.
Part C: ... with consideration of economic factors. Economic factors are those relating to the system of production, distribution, and consumption of goods and services.
One of the general themes that our group wanted for our project was the idea of a low cost low profit model. Essentially, we aim to prioritize consumer satisfaction and accessibility to our product over company profits. Therefore, important factors that we must consider to achieve this goal are cost of production and cost of labor. At the moment the cost of our product seems kind of high relative to the alternative options that are our there. For example, google maps navigation paired with an apple watch. However, most of the products do not come with a haptic feedback feature that provides additional safety for bike users. So as we’re building we’re looking for cost efficient parts, that are lightweight and user friendly, but also aren’t too unreasonable due to the safety the product provides. Our highest priority is safety and ensuring that those needs are met before all else. C was written by Forever.