WORK ACCOMPLISHED:
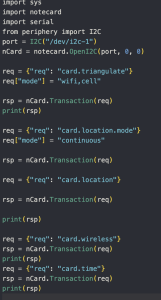
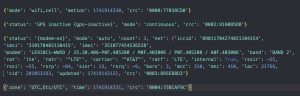
This week was mainly focused on unit testing, holistic testing, and fixing any bugs with our project. I was mainly focused on issues dealing with the GPS system. Through our testing we realized that it takes a considerable amount of time for our GPS module to lock in with a satellite ( > 5 minutes ). So I changed the orientation of the GPS module to see if that would result in a shorter connection time. This seems to have reduced the problem because we are able to connect to our device in less than 5 minutes.
In addition, we also made changes to our encasing. During our testing the device fell, which weakened the connection of our sensor to the acrylic case. We decided to apply more glue for a better stick, and extended the wire, so that there was less pressure pulling on the sensor when connected to the raspberry pi. I also did comparative testing to see if the current location of users being shown by our gps script, matched that of which the user actually was. In order to have a reference point, I used the Iphone’s internal GPS as a standard measure of GPS accuracy. I used this to map out 10 points on each journey route we had, and measured the differences in latitude and longitude as a metric for the accuracy of the GPS module.
I also assisted Emmanuel and Akintayo with their own unit testing for the week.
PROGRESS:
Currently we are where we are expected to be in the project, where we’re doing more cleanup and continuous testing to ensure it is in MVP form for the final week.
NEXT WEEK DELIVERABLES:
An MVP level design needs to be presented for next week. Expecting to have a good working demo, presentation poster for presentation and testing data.