This week we prepared for our interim demo by working on integrating each independent submodule onto the Jetson Orin Nano. This involved working on uploading the models and necessary Python libraries, ensuring that the camera interfaces with the board, and checking that the video streaming works. The walk sign model is in a near finalized state, and the final step for integrating it is being able to take in a video frame as input from the camera. This will likely require a new submodule that solely handles sending the camera feed to the two vision models. This would make our code more modular, but the challenge is making sure that it works and can interface with the two models correctly. For example, the walk sign model can take in image inputs either from the file system given a path to the image, or it might be possible to use some Python interface with the camera to get the data instead.
WIth regards to the object detection model, we spent this week working on quantizing the model to determine the smallest size possible for the models to fit onto the Jetson, while also maintaining performance. This tradeoff will likely need to be explored in a bit more detail, but this allows for small models and quicker inference, which may be a factor in deciding which versions of the object detectors will be in the final product.
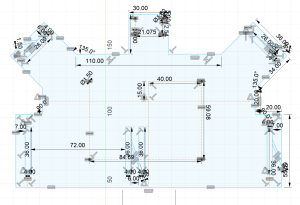
Concerning the hardware, work is continuing on the chest mount. We are now on the second revision, which finalized some dimensions with accurate (caliper) measurements and fixed some glaring comfort issues with strap angles. The design is not yet finalized, but prototypes are being made and laser cut. We are also working on calibrating / fine tuning the camera, to resolve some issues with red tint on the picture.