Enough progress has been made on each member’s respective subsystems for us to begin considering how to integrate all of the submodules onto the board together. The challenge is making sure that we can get all of the subsystems such as the walk sign classifier, obstacle detector, crosswalk navigator, speech module, etc. to work together. This will involve looking into how we can program the Jetson Orin Nano microcontroller and upload the machine learning models as well. The model performance is at a point where it is usable but could still use some finetuning, but it is more important at this point in time to make sure that we can actually run them on the board alongside the other modules.
With regards to the crosswalk navigation, we’ve begun implementing a basic feedback pipeline using text to speech libraries in python. No changes will be needed for right now, and we’ll likely need to wait until integration testing to determine if any further adjustments are needed in this submodule.
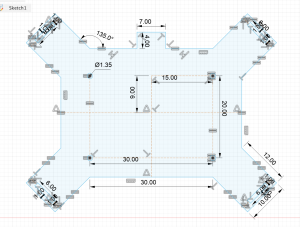
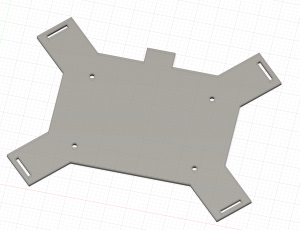
Concerning the hardware, work has begun on the design of the chest mount. Some images of the current design are included below. It will have straps at each of the four corners and will be worn like a chest harness. We plan to laser-cut the initial design out of wood as a proof of concept. The final version will be either ABS or wood, depending on which is more durable and easy to mount the devices onto. We will also likely add either a foam or TPU pad to the underside of the mount, as having a hard chestpiece would be uncomfortable for the user. With regards to the peripherals, the camera may have broken. This is system-critical, so will be the primary focus until it is resolved.