What did you personally accomplish this week on the project? Give files or photos that demonstrate your progress. Prove to the reader that you put sufficient effort into the project over the course of the week (12+ hours).
I did a great deal of things this week. I expanded the Embedded Controller subsystem with a few more libraries, all available on our organization’s GitHub repo.
I added the Magnet, Gantry, LimitSwitch and ChessGantry libraries, and I am almost done with the GameState library. The Magnet library controls the electromagnet, the Gantry library builds on the StepperMotor library by allowing positioning of the gantry in two directions. The LimitSwitch library provides control to detect when a limit switch is being pressed (this is for calibration). The ChessGantry builds on and abstracts the Gantry class by providing an interface for chess squares as opposed to position in inches, it can also execute a move using the following code:
// Move to the origin square center and pick up piece go_to_square(origin_row, origin_col); go_to_square_center(); _magnet.on(); // Return to square bottom-right corner go_to_square(origin_row, origin_col); go_to_square_center(); // Move to the destination square center and drop off piece go_to_square(dest_row, dest_col); go_to_square_center(); _magnet.off(); delay(500); // Allow time for magnet to turn off // Return to gantry origin go_to_origin();
I added some Arduino sketches to take in user inputs for functions over serial to test out these libraries.
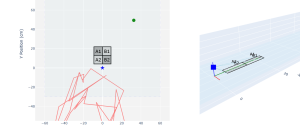
I also wrote a Python script that takes in user voice and detects chess moves e.g. “A1 to H8”. This is the worst-case backup in case we are unable to get gaze detection working for the final demo.
I also 3D printed some braces for the gantry to ensure it is perfectly squared. In addition, I designed and 3D printed some pawns, a queen, and a rook with a hole for the magnet at the bottom (see attached picture). These were used to test out the electromagnet.

Finally, today I helped Trey assemble the enclosure (everything except for the lid).
Is your progress on schedule or behind? If you are behind, what actions will be taken to catch up to the project schedule?
I am right on schedule.
What deliverables do you hope to complete in the next week?
The main tasks I have left to do is write the short library to parse serial input from the Jetson (or the speech-to-text Python script as a backup), and wire up the LEDs and write code for that. After that, it will all be testing.
How will you analyze the anticipated measured results to verify your contribution to the project meets the engineering design requirements or the use case requirements?
So far, I have tested and calibrated stepper motor and gantry movement, to verify the number of inches it is intended to move is how much it actually moves. When calibrated, any given gantry move is within ±1% of the input position in inches. I have also written Arduino sketches to verify some of the smaller parts of my subsystem, such as the limit switches and magnet, and these work as intended. As soon as I am done writing the ChessState library, I will write an Arduino sketch and play 10 chess games on it, which I will use to validate the game state after each move function call is what it should be. Once we finalize the board this week, I will also be able to validate the ChessGantry library’s movement by using it to move a small magnet across the top of the board to a number of specified positions and measuring the error. Finally, I will integrate the Arduino with the Jetson/speech-to-text script, and validate that UART connection by measuring the difference in message sent and message received timestamps.
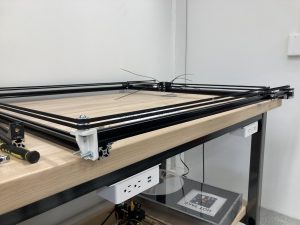 As the image shows, the entire gantry is now assembled. I went through and continued to touch up the angles and tightness of the rails so that the middle bar rolled easily. This took some time to ensure that everything was ready for testing. Then, I worked with Tarek to help him set up his configuration to test his Arduino code with my gantry system. We saw great results in being able to control the gantry with great detail. The entire system moved smoothly and we were able to move it vertically, horizontally, and diagonally. An example video is found here:
As the image shows, the entire gantry is now assembled. I went through and continued to touch up the angles and tightness of the rails so that the middle bar rolled easily. This took some time to ensure that everything was ready for testing. Then, I worked with Tarek to help him set up his configuration to test his Arduino code with my gantry system. We saw great results in being able to control the gantry with great detail. The entire system moved smoothly and we were able to move it vertically, horizontally, and diagonally. An example video is found here: 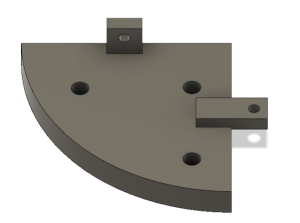


 As the image shows, the bones of the gantry system are all assembled. This involved a lot of measurements, layout, precise angles, and assembly with screws, nuts, and sockets. The middle bar can move freely left and right due to the wheels on the 3D-printed assembly holding it up. The trolley system in the middle was also 3D printed and carries the electromagnet for our design. It can move freely up and down, allowing motion in both the X- and Y-directions. Lots of small adjustments had to be made throughout the assembly to ensure the bars were not pinched or angled in a way that limited movement. Due to some issues with the timing belt, we have to wait for another to be delivered before finishing the entire pulley system. Once that arrives (hopefully Monday), we can finish the entire system and begin testing with Tarek’s Arduino code. This was an exciting piece of progress! It was very fulfilling to see the design begin to come to life, and I am excited to watch it perform during our initial testing.
As the image shows, the bones of the gantry system are all assembled. This involved a lot of measurements, layout, precise angles, and assembly with screws, nuts, and sockets. The middle bar can move freely left and right due to the wheels on the 3D-printed assembly holding it up. The trolley system in the middle was also 3D printed and carries the electromagnet for our design. It can move freely up and down, allowing motion in both the X- and Y-directions. Lots of small adjustments had to be made throughout the assembly to ensure the bars were not pinched or angled in a way that limited movement. Due to some issues with the timing belt, we have to wait for another to be delivered before finishing the entire pulley system. Once that arrives (hopefully Monday), we can finish the entire system and begin testing with Tarek’s Arduino code. This was an exciting piece of progress! It was very fulfilling to see the design begin to come to life, and I am excited to watch it perform during our initial testing.