General update
This week, Liam got a gaze model working on a Windows Laptop. He still has to refine the depth calculation. This will be the focus of the early days of this week.
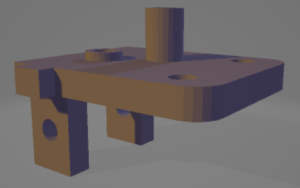
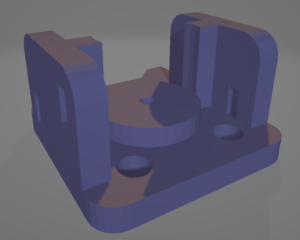
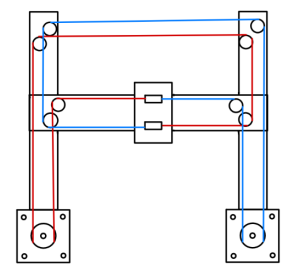
All pieces (including screws, washers, etc.) are now obtained to assemble the gantry system. This will be completed by the end of the week, with testing commencing once Tarek returns to Pittsburgh. Tarek also wrote some additional code to control the motors in our design, so these tests will verify the functionality of the code and the gantry design.
Potential risks and risk management
No new risks this week. The initial gaze model work from Liam is encouraging, but will be tested further once the proper camera stand is obtained.
Overall design changes
No design changes this week.
Initial Schedule
Schedule is still on track. Spring break was less productive as our team was away from the campus and our project, but we are refreshed and prepared to grind out some work to complete the design of our subsystems and initiate testing.
Additional Week-specific Items
Part A: Global Factors (written by Trey)
Check, Mate, Vision addresses the global need for increased accessibility in recreational activities, particularly for individuals with physical disabilities or limited upper body mobility. Chess is a globally recognized and widely played game, but its traditional physical requirements create a barrier for individuals who cannot manually move pieces. Our solution eliminates these barriers, allowing users to engage in strategic play without needing to touch the board physically. By creating an inclusive chess-playing experience, Check, Mate, Vision promotes cognitive stimulation, social interaction, and emotional well-being for people around the world.
This solution also reflects a growing global need for assistive technology and adaptive design. As populations grow and the number of individuals with physical disabilities increases, there is a rising demand for products that enhance independence and inclusion. Check, Mate, Vision addresses this need by empowering users to engage in a complex intellectual activity without relying on the assistance of another person. The system’s reliance on common and scalable technologies, such as electromagnets and microcontrollers, ensures that it can be adapted to different environments and production scales.
Part B: Cultural Factors (written by Liam)
Chess has a rich cultural history spanning 1,500 years across numerous civilizations, and the physical experience of playing the game carries significant cultural value. Check, Mate, Vision preserves this traditional experience by maintaining the original chess environment instead of shifting to digital alternatives. The unobtrusive design requirement ensures minimal extra components are visible from above the table, maintaining the important classic chess that many cultures have experienced.
Part C: Environmental Factors (written by Tarek)
While our project is mainly geared towards accessibility, we have taken some decisions with regard to environmental factors. One key decision is optimizing energy efficiency by using stepper motors with precise motion control, reducing unnecessary power consumption. The embedded controller ensures that movements are executed only when necessary, preventing idle power drain. Additionally, the LED feedback system will be implemented with low-power LEDs to minimize energy use while still providing clear user communication.
Material selection is another factor in reducing environmental impact. The gantry system and enclosure are constructed using durable metals and recycled plywood, ensuring longevity and reducing waste from frequent replacements. Additionally, the modular nature of the system allows for repair and upgrades, extending its lifespan rather than requiring full system replacement. By designing Check, Mate, Vision with energy efficiency, environmentally-conscious materials, and longevity in mind, the system not only meets its accessibility goal but does so with minimal environmental impact, aligning with broader sustainability considerations.