Personal Accomplishments:
This week, I focused on getting the screen implementation working so I wouldn’t impede progress. Once I have this calibrated and working decently well, I might spend a bit of time with the stereo camera. I also created the UART Python code on the laptop side to interface with the Arduino. Using the screen 
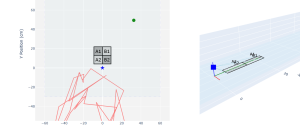
Testing: Manual testing has been conducted to optimize the screen eye-tracking accuracy. While quantitative accuracy testing is not yet implemented, it is scheduled for completion within the next week. The next critical integration phase involves connecting the laptop/Jetson to the Arduino via UART communication, as outlined in the design report. This integration will utilize predefined character strings to establish reliable data transfer protocols.
Progress:
I am on track so that the team can deliver a finished product. Hopefully, I can flesh this out on Sunday properly.
Future Deliverables:
Clean up and polish screen code
Work potentially on stereo camera one.