What did you personally accomplish this week on the project? Give files or photos that demonstrate your progress. Prove to the reader that you put sufficient effort into the project over the course of the week (12+ hours).
I started off the week by working with the IDeATe staff to get our parts printed, and to be able to print parts quickly in the future. I 3D printed the pieces for the gantry and the camera stand and delivered them to the group. Given that I still couldn’t test my Arduino motor code until the gantry was fully set up, I started working on later tasks, such as the chess logic, overall main routine, LEDs, and additional peripherals.
I chose and ordered some shift registers, 74HC595s in particular, to control the chessboard LEDs. These are a better choice than the previously chosen MAX7219 LED driver because they can more accurately and responsively light a single LED at a time, as the MAX7219 uses row and column scanning, while the shift registers can simply set a row and column high. For a system where users are constantly looking around and high responsiveness is necessary, this is a better choice and worth the extra wiring. I also designed the circuit for this.
I also created a GitHub repository (I wasn’t able to do this while in Europe because 2FA wouldn’t let me log in), and uploaded commits of my previous Arduino code versions. I added a main routine that I will be using to guide the design of the other embedded controller libraries (motor control, magnet control, LED control, keypad, and chess logic) .
Finally, I assisted Trey with assembling the gantry, and continued working on the chess logic file.
Is your progress on schedule or behind? If you are behind, what actions will be taken to catch up to the project schedule?
Still bottlenecked by not being able to test the Arduino motor code, so I am behind on the gantry motion control. However, I spent time getting ahead on parts I was not meant to start later, so I am not too far behind overall.
What deliverables do you hope to complete in the next week?
Now that the gantry is finally assembled, I will be testing the Arduino motor code over the next two days, and then refining the motion of the gantry throughout the board (e.g. moving pieces between other pieces and recalibrating gantry after every move).

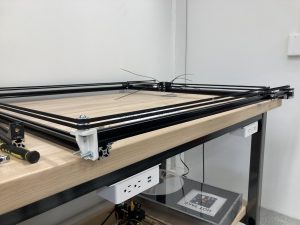 As the image shows, the entire gantry is now assembled. I went through and continued to touch up the angles and tightness of the rails so that the middle bar rolled easily. This took some time to ensure that everything was ready for testing. Then, I worked with Tarek to help him set up his configuration to test his Arduino code with my gantry system. We saw great results in being able to control the gantry with great detail. The entire system moved smoothly and we were able to move it vertically, horizontally, and diagonally. An example video is found here:
As the image shows, the entire gantry is now assembled. I went through and continued to touch up the angles and tightness of the rails so that the middle bar rolled easily. This took some time to ensure that everything was ready for testing. Then, I worked with Tarek to help him set up his configuration to test his Arduino code with my gantry system. We saw great results in being able to control the gantry with great detail. The entire system moved smoothly and we were able to move it vertically, horizontally, and diagonally. An example video is found here: 


 As the image shows, the bones of the gantry system are all assembled. This involved a lot of measurements, layout, precise angles, and assembly with screws, nuts, and sockets. The middle bar can move freely left and right due to the wheels on the 3D-printed assembly holding it up. The trolley system in the middle was also 3D printed and carries the electromagnet for our design. It can move freely up and down, allowing motion in both the X- and Y-directions. Lots of small adjustments had to be made throughout the assembly to ensure the bars were not pinched or angled in a way that limited movement. Due to some issues with the timing belt, we have to wait for another to be delivered before finishing the entire pulley system. Once that arrives (hopefully Monday), we can finish the entire system and begin testing with Tarek’s Arduino code. This was an exciting piece of progress! It was very fulfilling to see the design begin to come to life, and I am excited to watch it perform during our initial testing.
As the image shows, the bones of the gantry system are all assembled. This involved a lot of measurements, layout, precise angles, and assembly with screws, nuts, and sockets. The middle bar can move freely left and right due to the wheels on the 3D-printed assembly holding it up. The trolley system in the middle was also 3D printed and carries the electromagnet for our design. It can move freely up and down, allowing motion in both the X- and Y-directions. Lots of small adjustments had to be made throughout the assembly to ensure the bars were not pinched or angled in a way that limited movement. Due to some issues with the timing belt, we have to wait for another to be delivered before finishing the entire pulley system. Once that arrives (hopefully Monday), we can finish the entire system and begin testing with Tarek’s Arduino code. This was an exciting piece of progress! It was very fulfilling to see the design begin to come to life, and I am excited to watch it perform during our initial testing.