
PERSONAL Accomplishments
- Electromagnet Testing (4hr): Since the electromagnets were delivered this week, I wanted to do some testing to ensure they would work for our system. We received two electromagnets — one with 2.5kg holding force and the other with 5kg holding force. Both were attached to a 5V input supply. We gathered some ferrous pieces of metal (more on that later) and some potential board materials to test. I determined that the 2.5kg electromagnet would not be strong enough for our design. The 5kg electromagnet was able to move pieces of metal smoothly through 1/8″ thick plywood and acrylic. Increasing the thickness to 1/4″ limited the functionality of the magnet. For the 1/8″ thick materials, the plywood appeared to be a better choice for smooth motion. We found that the magnet would not easily attract nearby metal if already holding onto a large piece of metal. I also found some random results, such as the electromagnet working better at 5.5V than 5V. Overall, this proved that the electromagnet could work through a chessboard surface. Now, testing will focus on moving actual pieces with other pieces nearby. A video of this test can be found below:
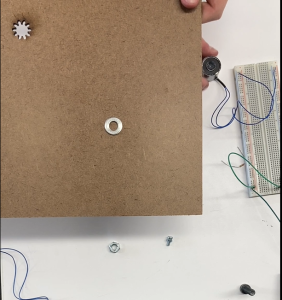
2. Finding the Right Metal (1hr): As mentioned above, electromagnet testing also brought about considerations of the size and shape of the metal needed for our pieces. Liam and I spent an hour retrieving various metal nuts, washers, and screws from TechSpark to determine the best fit. Testing showed that a heavier piece moved more smoothly, although the piece could be too heavy. Some washers/nuts didn’t move easily due to the large hollow middle. We will need to find a solid piece of ferrous metal with some weight to place inside each chess piece. The weight could also be provided by the chess piece itself.
3. Interfacing Stepper Motors with Arduino (3hr): I worked with Tarek to get the step motors moving using the Arduino Mega. First, I had to learn about the wiring of the step motors and the interface of the motor drivers. After that, I helped to wire the two together and connect them back to the Arduino. We played around with various input voltages (within the specs of the drivers) and configurations to determine step size. Ultimately we got the motors to spin with the desired rotation. Tarek will post more details on his status report.
4. Mandatory Lab Meetings (4hr): During our lab sessions, I watched Tarek present our design review presentation. Once again, we received good questions about handling edge case rules in chess. We also received feedback from Professor Kim, who advised that our pedal to lock in moves may go against the accessibility that our product advertises. We plan to carry this feedback into our design to handle chess logic properly and determine a better move lock mechanism (voice or facial recognition). I also got the chance to witness other groups present their design presentations and give valuable peer reviews. It is encouraging and stimulating to see the design choices of other groups.
5. Gathered Data for Design Report (2hr): As the design report is upcoming, I wanted to get ahead on some of the elements needed for my subsystem. As such, I began gathering data about my components into one shared document. I also started to create visuals to represent the design decisions that I made, and why I believe that my decisions were best for our project. We will continue working on the design review throughout the next week.
Progress
My progress is still slightly behind schedule to finish an MVP design by spring break. I believe that I can have some assembly completed by this week, but the design report could be a huge undertaking. Depending on how much work that requires, it may take away from my available time for assembly and testing this week. I will have plenty of time directly after spring break, which should allow me to get back on track.
Next Week Tasks & Goals
- Design 3D-printed trolley component to hold electromagnet in our gantry system.
- Assembly entire gantry system outside of the box.
- Finish design report.