
We are caught up with the physical build. The robot is currently designed for testing: a detachable platform to test for slop climbing, and a small linear actuator (LA) for platform testing. I drilled the L brackets onto the platform and the LA onto the board. I also completed the rest of the motor controllers to motor wires.
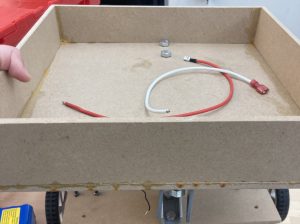
IMG 1. Completed Board and Platform

IMG 2. Completed Wheelbase with mounted LA

IMG 3. Added Mounts to platforms
I got our LA to run. Here is a link to the video. https://drive.google.com/drive/folders/1XDY6sC3153WC3wEnl2y9C_0TSnG_CBZb. During this part, I fried a motor controller… Sorry.
I tried to use yarn to stabilize our LA, did not work. We purchased a P-series mount to straighten the LA’s when the bot is going up a slope.
I am on schedule with the robot body, as we previously discussed that testing would be conducted in a different manner to accommodate a testing schedule for individual parts. I decided not to install the electronics yet since they are needed for separate component testing. To compensate, I plan to fully utilize this testing mode to make sure our robot works completely. This involved drilling holes in the platform for the mount, which could result in water leakage onto the board. I plan to glue pieces of wood to the platform and the bottom for added security when we add the different p-series.
However, we are behind schedule on the robot itself. While we have the code, we are rushing to complete implementing it. To compensate, we plan on working on smaller parts and combining them later.
Next week, I plan to assist Raymond with his work and continue testing the robot platform and its driving capabilities.