
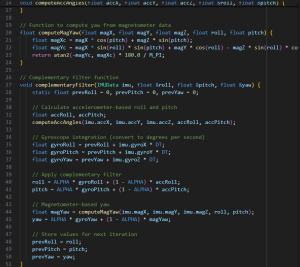
This week, I started implementing some code on the FPGA, specifically the complementary filter for the IMU data. I looked into the different kinds of filters such as complementary, Kalman, and Madgwick filters. Ultimately I decided on the complementary filter because it is the simplest to implement. However, if the accuracy of the data is not good enough, I may move to a Kalman filter because I could use the FPGA hardware to do the necessary matrix computations. I also watched a few videos on using FPGA’s for embedded systems projects which gave me a good idea for integrating all the sensors with the FPGA.
The schedule is a little behind once again because the IMUs have not arrived yet. So, I wasn’t able to test if the FPGA can receive data from the IO pins. Once the sensors come in, I expect that I will be able to quickly test the IO ports and get the sensors integrated with the filtering algorithm.
In the next week, I hope to get the sensors integrated with the system. The motors have also arrived and the motor drivers were ordered recently, so if the motors arrive, I also expect that I can test the FPGA with the motors.