Team Status Report (4/19/25)
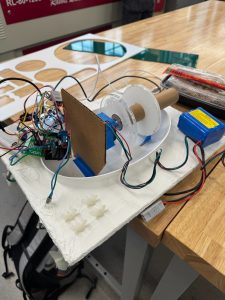
This week, our group has been focusing on the final stages of integrating in order to get the boat and camera unit assembled and into the water. Abie and Emma have been working on testing the submersible camera unit in the UC pool, and have taken images using different pool toys to mimic coral under the water, which will be used to verify the ML algorithm. Emma and Maddie worked together to integrate the code from the underwater motors and the stepper motor, which controls the depth of our submersible. These two functions are now displayed together in the Arduino Cloud Interface. Our new temperature sensor arrived late in the week and was also added to the interface. Maddie worked on debugging and finalizing the stepper motor code and circuit as well as soldering our various circuits together onto a final protoboard. She also laser cut an acrylic box designed by Emma to house our submersible unit. As a team, we are on track to complete the project. Our final tasks include additional waterproofing, which has been slightly delayed due to our ordered parts arriving this Monday and Tuesday. For our final demo, we also plan to prepare spare parts so that if something goes wrong, we will be able to switch out that individual part. For waterproofing, we ordered more waterproof sealant, some liquid silicone sealant for the cable, waterproof tape for the cable, and extra parts for all of our electronics, if something is damaged during testing. We have extra acrylic that we will likely use to waterproof the electrical components on top of the boat. We also all are helping prepare our final presentation slides. Below are some videos and videos that show our current prototyping progress.
Video: Three videos of components on the cloud working together