Maddie Status Report (4/12/25)
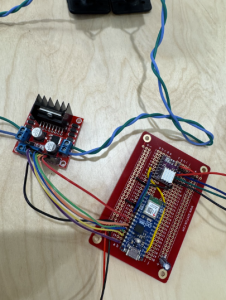
This week, most of my time was spent soldering our arduino and motors onto a protoboard, rather than the solderless breadboard that was prone to wires moving. This will allow us to handle the boat a bit less cautiously, as well as making waterproofing easier and able to be more permanent.
Doing this required some reassignment of pins, as well as the addition of a capacitor and research into the voltage range accepted by each of our drivers. Our system required three different voltages in various places, so I did research on how to minimize this and simplify our board as much as possible given that we only had two power rails. Additionally, we originally soldered the arduino nano and stepper driver too close such that we couldn’t plug in the arduino so I spent more time correcting this than I would have liked – live laugh lcry :/
Lastly, as discussed in the team update, there have been some issues with the spool and how quickly it accumulates wear and tear. I have spent time coming up with a number of potential solutions to this. As a result, we will be able to decide and implement the most appropriate solution quickly, once everything else is in place. There is a slight chance that the final spool won’t be completed by the start of class on Monday, which would be a break from our goal of being operational by then. That being said, the spool does currently work so we could mount it as a temporary option, and there is a chance that the updated version works by then. We’ll just need to see how balanced and buoyant the boat is tomorrow morning, and decide, as a team, whether we value short-term success in meeting our goal or long-term durability.