
Personal Accomplishments
-
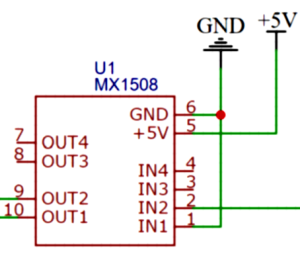
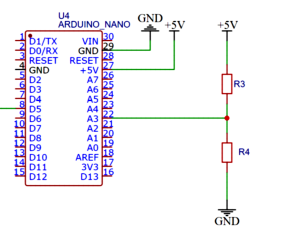
Completed the circuit and 3D model for the stirring mechanism, preparing it for physical printing and testing.
-
Recalibrated the robotic arm’s control software and hardware, expanding its operational range from a limited 1/4 of its surrounding space to nearly full-range motion. This involved modifying control parameters in the existing library and validating smooth, stable movement across all angles. Calibration Testing: Link
-
Assisted in debugging and integrating the wheel structure with the valve system, helping wire and test hardware connections to ensure consistent and coordinated motion between modules.
Next Week Deliverables
-
Physically integrate and test the stirring mechanism, confirming its performance and compatibility with the drink mixing process.
-
Integrate the robotic arm into the complete system, ensuring it functions with the valves, garnish wheel, and WebApp.