
Personal Accomplishments
- Debugged and fixed circuitry for the solenoid valve and motor driver, ensuring consistent activation and response time.
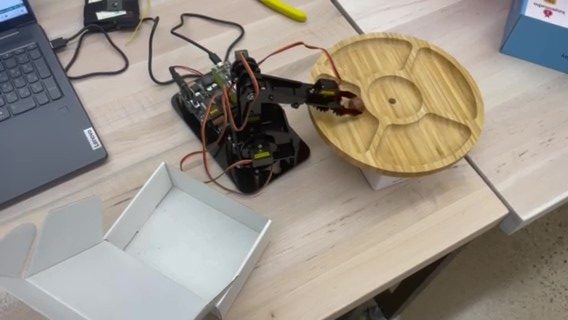
- Refined robotic arm control, enabling it to execute a sequence of pose-changing commands to grab and place garnishes.
- Successfully tested the arm by picking up a chocolate ball as a placeholder garnish.
- Designed the system to be adjustable for different garnish types, allowing flexibility for various drinks.
- The working sample can be viewed here: Link
- Worked on the 3D printable designs for the Stirrer:
Next Week Deliverables
- Complete the stirring system design and circuitry, ensuring smooth integration with the drink mixing process.
- Work on system-wide debugging and integration, ensuring all hardware and software components communicate effectively.
- Coordinated with teammates on system-wide integration, preparing all working individual components for integration.