Mostly I worked on redesigning the modules. We used some of the advice from Gloria and made a model with slanted walls. I also got it printed
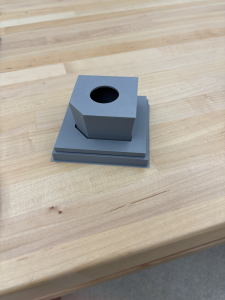
It works better than the last print. There’s enough room to insert it somewhat comfortably. I fear there might be some issues in a more high pressured environment with fitting. I’m not sure how exactly to solve that, I think maybe rounding the edges might help. But I will discuss more with the rest of the team.
I next need to make the cap for the module. Right now it’s just a generic hole, but we want to make a cap that can be easily snapped on (for reusability purposes) and also we need to make the holes custom to the specific type of peripheral they will be housing.
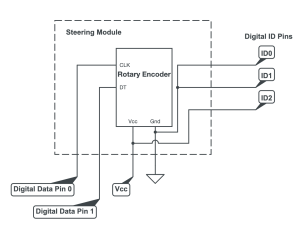
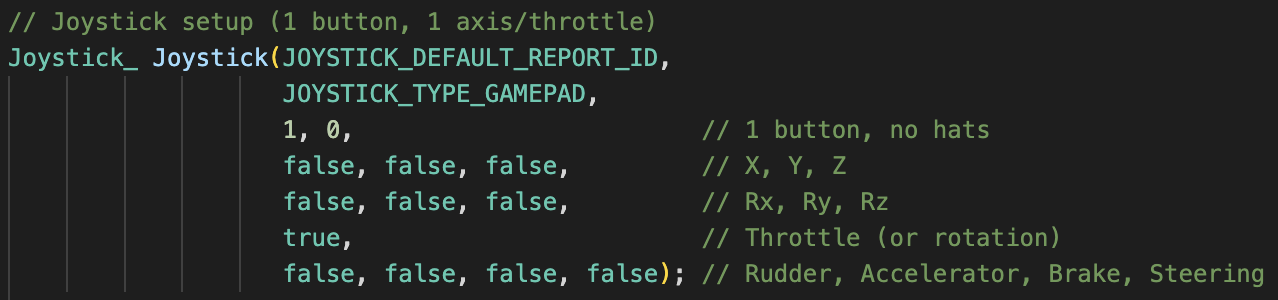
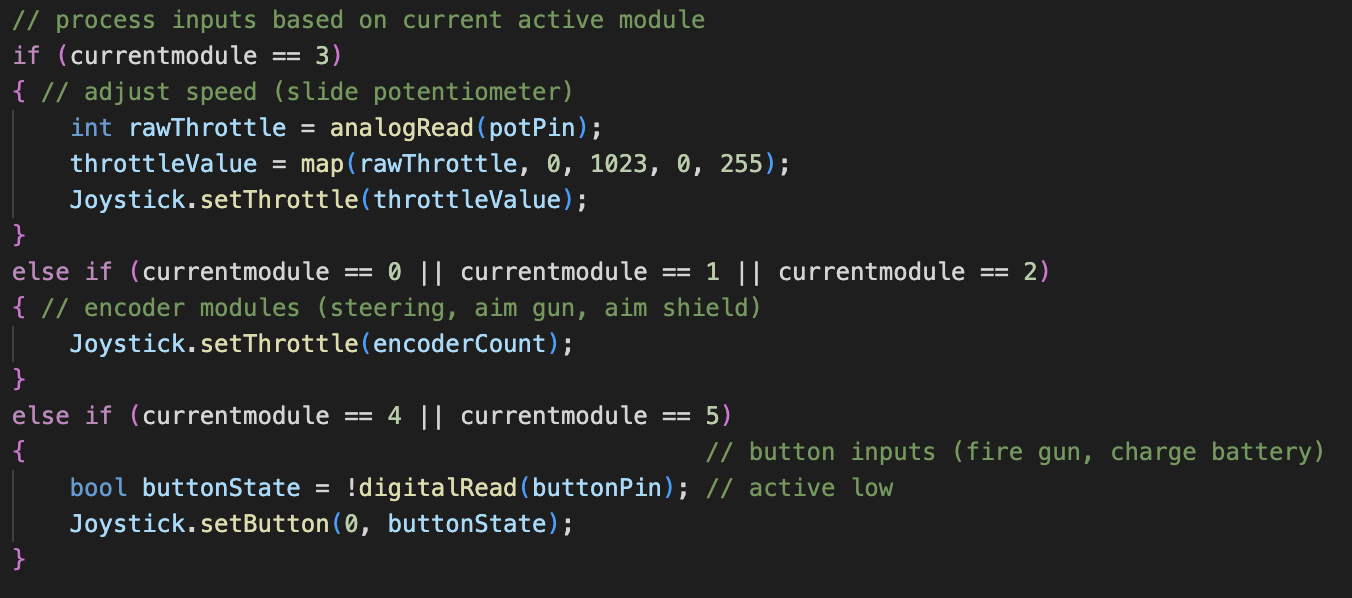
Lastly, I made some more progress on the code (which can be seen on the github). These changes were mostly centered around the encoder but also a lot of actual integration efforts. We got to read actual inputs and test it with a sample protoboard that John made.
For next week, I want to finish the cap design (mentioned above) and then print out the laser cut walls for the controller. There are also some discussions I want to have about the sending the encoder values from the arduino, that I have been saving for an in-person discussion. I think we should get that finalized soon just so we can integrate the arduino with the unity game, since we do have the protoboard set up at least. Also, we need to do some work for the ethics assignment.
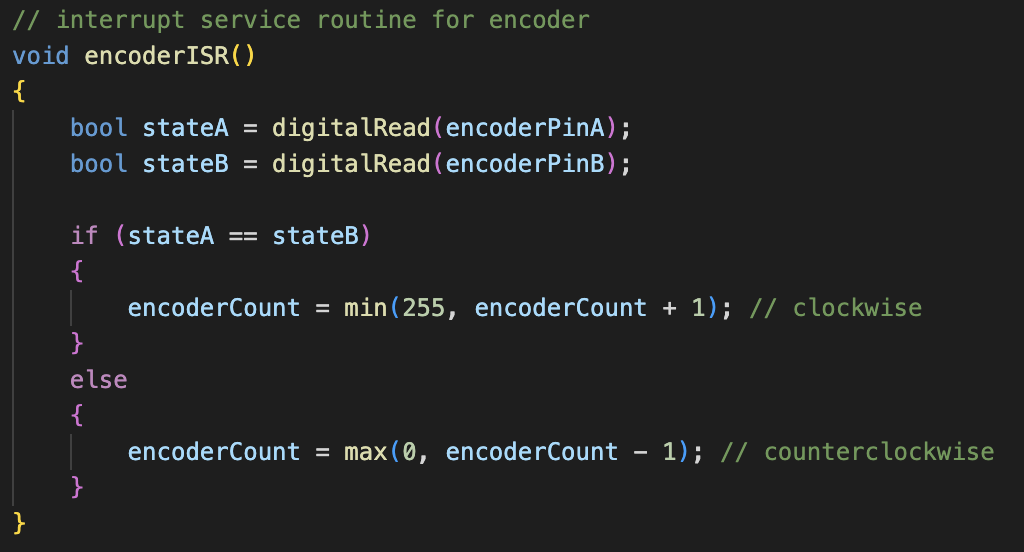 The ISR is attached using
The ISR is attached using