
We’re mostly done, so I don’t have too many updates. I helped paint the controllers. I have started working on the poster.
Alan’s Status Report 4/19
So, I was pretty busy this weekend working on the final presentation and I didn’t get around to writing this. But, as it would turn out one thing I worked on this week was the final presentation slides. Another thing I worked on was ordering the paint. I didn’t get time to do too much else, a tad bit of debugging on the integration.
Team Status Report 4/12
The biggest risk to our project is probably we need to get the game play testable soon so that we can get feedback and iterate upon it. The next playtesting night is this Tuesday 6-8 so we want the game playable by then.
No changes have been made to the overall design.
Photos are in individual status reports. We’ve made some good additions to the game. We also have working prototypes of the controllers.
For the enjoyment of the game requirement, we have made a survey and plan on giving it to playtesters at the hunt playtesting night. We have already met the cost requirement and we have calculated the cost of parts in our design report. We will add timers to our code to detect the more quantitative timing requirements.
Alan’s Status report 4/12
This week and last week I did a decent amount of iteration and printing of the modules. Again, I forgot to take pictures of the 3D prints, but I think yall saw them at the interim demo.

picture of new lid with snappable feature.
John got the electronics to work in time for demo. Past demo, we decided to make the module body shorter since we didn’t end up needing all that space and it would have a nicer feel for the player. I also had to fix the module holder design since there was not really any way to properly insert the pogo pins in the current design (I don’t have a picture of that either, but I guess you’ll see it at demo or our weekly meeting).
I also laser cut a second controller so now we should have all the parts for everything necessary for final demo.

controller
For verification of the module designs, a lot of the physical requirements are pretty straight forward to test. The dimensions of the controller are guaranteed because I CADded the wood faces to meet those specs. The weight we will test by weighing the total of the controller panels and the arduino. I’m not entirely sure where to get a scale, but I don’t think it should be too hard to find one.
We will get be able to test some of the durability and ease of module swapping requirements when we actually get to play testing.
Team Status Report 3/29
Since Alan got the modules 3D printed, it seems most of our stresses are gone now. John is working on the wiring before interim demo. If this does not work, that would, as of now, the most significant risk to our interim demo seeming functional to any staff members. But we are working on it now, so hopefully it should be fine by demo time. The game is on progress, Angela has all the basic enemies finished. We just need to get end-to-end integration tested and ready for presentation.
No real big changes were made, we did end up making the module taller than I believe our design reqs stated. This was mostly for our own ease of assembly when putting electronics inside. I think we can justify this as a limitation of this being not a professional product where we would likely have the tools to assemble this easier.
Schedule is still the same.
Pictures are in individual status reports.
Alan’s Status report 3/29
I redesigned the snaps on the lids so that they would be thinner and hence more flexible. Also with the upcoming interim demo coming up I added peripheral fit holes for each of the lids. I got all of these 3D printed and these turned out to work! I don’t have pictures of the 3D prints, but I guess you’ll see them at the demo. Here’s a quick screenshot of the new snap feature

I also laser cut out one of the panels for the controller. This also turned out decent, I think we need to glue it together, however. But for demo, it should be fine.
I think my progress is mostly on track now since we have working CAD models for everything and we have most of it actually printed. I think the only potential new things to be printed are we need 2 additional module holders and the laser cut controller. If we also do end up changing the module design for space/feel reasons, we would need to reprint those. But otherwise, everything seems functional.
Team Status Report 3/22
Again, our most significant risk is probably the module design. It’s been making progress, but it’s still behind schedule and Alan has been busy with other classes 🙁 We still have the protoboard demo that John made as a contingency.
We haven’t made any design changes to the system. We discussed how the encoder will be represented in the controller for a bit, but we did not really get around to implementing that yet.
Photos of individual accomplishments on the various aspects of our project can be seen in the individual status reports!
Alan’s Status Report 3/22
Most of my time this week was spent on reiterating on the module design and also working on the ethics assignment for our team. The latter is self explanatory, so I won’t go into any detail for that.
I finally got the snap feature for our caps designed. I followed these youtube tutorials for guidance
This is a cross section of what our module and the holder design looks like after I made the changes in CAD.
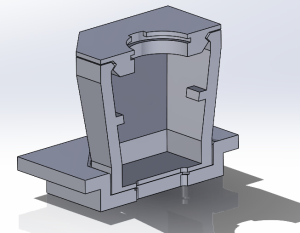
As you can see, the top piece has been developed significantly and there is now a angled latch feature. Hopefully the margins are right for it to attach securely, but I guess we’ll see after printing. I also last minute added some impromptu ledges (those rectangle blocks halfway up) so that we can fit another protoboard. I think we might want to make the modules shorter, but I’m not sure how much we can without it getting too hard to physically configure the wiring of the electronics inside, since we need to do that by hand.
Otherwise, another change I made after seeing last week’s iteration printed out is make the holes for the pogo pins larger. Last time there was not enough margin to fit them in, hopefully it’s better now.
I’m still pretty behind schedule on module design, this is taking longer than I expected and waiting for a design to get printed before reiterating on the design to make any requisite changes is time consuming.
Next week, I plan on continuing to reiterate on the module design. I think we should be finalized on overall design, just need to see if any fixes need to be made after this gets printed. Next, I need to work on making specific arrangements so that each type of module can be inserted appropriately and stay there. That will likely take more trial and error.
Team Status Report 3/15
The most significant risk we have identified right now is the design of the modules. We’re a bit late schedule-wise with it, and it is quite essential to the enjoyability and feel of our game. Alan’s been a bit slow with the CAD designing, but we have some models already printed. We are working on getting those finalized quickly, so we will have a prototype for the demo. In the meantime, we are able to model the functionality of the reconfigurable controller from the mock protoboard that john designed. Which I guess can serve as a contingency for our interim demo, but that is very not ideal. We also have some prototype designs for the modules printed out, but they still need refining.
No changes were made to the overall system. We have slightly altered the design of the modules to have a better grip. I guess we also made decisions to have an attachable cap in order to make it easier to iterate on the module design without having to glue things together and then unglue them.
No changes have been made to the schedule.
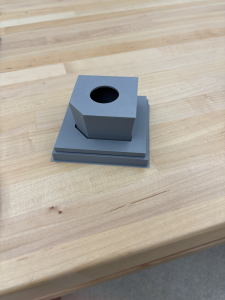
Photo of newly designed and printed module and holder:
Alan’s Status Report 3/15
Mostly I worked on redesigning the modules. We used some of the advice from Gloria and made a model with slanted walls. I also got it printed
It works better than the last print. There’s enough room to insert it somewhat comfortably. I fear there might be some issues in a more high pressured environment with fitting. I’m not sure how exactly to solve that, I think maybe rounding the edges might help. But I will discuss more with the rest of the team.
I next need to make the cap for the module. Right now it’s just a generic hole, but we want to make a cap that can be easily snapped on (for reusability purposes) and also we need to make the holes custom to the specific type of peripheral they will be housing.
Lastly, I made some more progress on the code (which can be seen on the github). These changes were mostly centered around the encoder but also a lot of actual integration efforts. We got to read actual inputs and test it with a sample protoboard that John made.
For next week, I want to finish the cap design (mentioned above) and then print out the laser cut walls for the controller. There are also some discussions I want to have about the sending the encoder values from the arduino, that I have been saving for an in-person discussion. I think we should get that finalized soon just so we can integrate the arduino with the unity game, since we do have the protoboard set up at least. Also, we need to do some work for the ethics assignment.