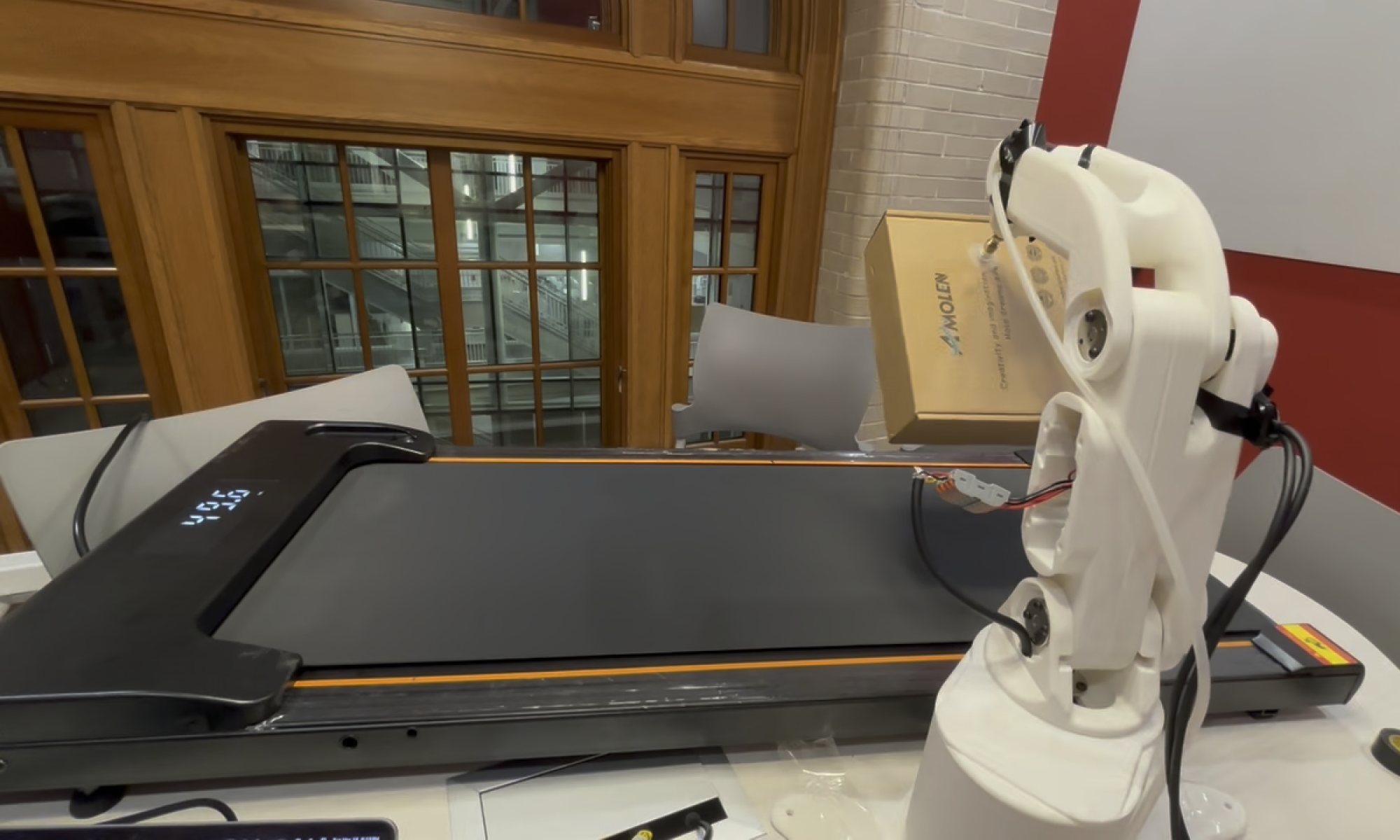
This week I finished up wiring the robot and wrote code to run and send angle feedback position moves. It took alot of trouble shooting to get all three angle sensors accurately measuring 0-180 of the three main actuators but luckily it wasn’t to hard to get the vacuum to turn on and off. I spent alot of time this week wiring, troubleshooting, and programming the robot arm. Luckily all the work paid off and we had a successful package pick up and move. I was able to get the robot to run to 7 diffrent positions in a row using a command sender app and a Arduino control sketch. I got the robot to pick up a moving package on its 15th try.

Our next steps are combining our QR and robot algos, then we should be able to sort package efficiently