This week, I focused in on testing the sensors and insuring their robustness for different users. As previously mentioned, I had overtrained the algorithm based on my own testing, so I spent this week gathering the data needed in order to improve the algorithm. After gathering a lot of data, I was able to infer two major things: I should move the position of the sensors inwards to the center of the chair, and that the difference in accuracy I was seeing was based more on the height of the chair I was using. I found that by raising the chair off the ground to simulate what an office chair is like (where peoples legs and knees are not pushed past a 90 degree angle), I was able to get much more accurate results on when people were deviating from their baseline posture. As well, moving the sensors in closer together helped get overall more data from users with different sitting positions, as it was more likely that their weight was distributed over the sensors. However, this is one of my biggest tradeoffs. We wanted to have direction of lean be part of the alert that the user is receiving, but in order to get the accuracy of alerts when deviating from baseline, I needed to not send the direction of the lean. Specifically, this means that while the accuracy of when to send the notification is very high, the heat map (which was a stretch goal) will not always be accurate. I also began to work on the Final Presentation slides.

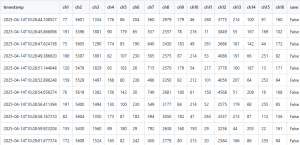
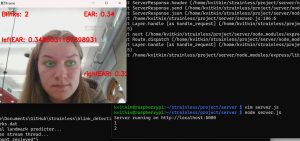
Lilly testing the seat module – the [0,0,0,1] means the algorithm has detected an incorrect posture (in this case the crossed legs paired with the lean back). She was testing different positions for ~5 minutes, and the video recorded her posture and how the algorithm processed it.
My progress is on schedule, as I will continue testing this week and making any modifications I need. This upcoming week, I will focus on testing with many more users for extended periods of time (more than the 5-10 minutes of my current tests). Specifically, I want to see how well the averaging of the data for other people works over an extended period of time.
As I have worked on our capstone project, I have learned quite a bit of new information. This was my first time properly working with an RPi, I had to learn to properly use the ssh / setup virtual environments in order to properly run code. As well, this is the first time I have written any sizable program in Python, as almost all of my past projects and experience have been in C/C++/Java. I learned mainly through looking at the datasheets and adafruit guides, as well as figured out errors through reading forum posts. I also used javascript for the first time, which Cora helped me with. As well, I learned how to laser cut to make our overall box which holds all the components.