This week, I continued to verify the seat module, as well as improve the code/design I already had. First, I created a cover and attachment for the seat module. This is a cover for the plastic sensors, which are located inside. I then tested to ensure that the cover does not change the outputs of the pressure sensor readings, which it does not. I also ensured that the straps which hold the cover in place are adjustable using velcro, meaning that the cover can be moved between chairs if need be. I then created a casing for the RPi5 and the wiring for the seat module. This is to ensure there is a much smaller tripping hazard, as well as keep all of the wiring safe and isolated from the user as much as possible in order to prevent any potential shock.


After that was complete, I also ensured that the way we were saving baselines was modified to remain consistent with the rest of the teams – this meant ensuring that a baseline could be saved multiple times in the span of one work session without needing to completely restart the program.
I also wrote a simple bash script which will start up all of the different modules in the program (the neck sensor, lean sensor, and server) in order to ensure we make our solution as easy as possible for users.
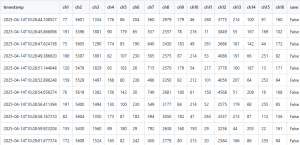
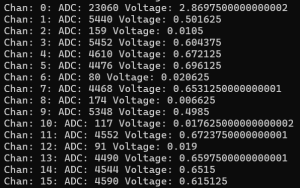
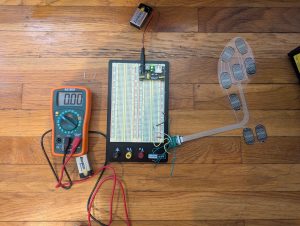
Lastly, I began testing the seat module with different people. Right now, I was only able to get one person to test, and I saved all of the sensor data to a csv file. I will be using this data (plus that of other peoples) to continue modifying the algorithm for detecting a lean to make it more robust.
Attached is a brief video which shows how the sensors change when someone else is sitting on the chair.
I would say that I am definitely on track to meet the deadline for our project. I have finished the creation completely, as well as all integration I need between components for the module I own. All I have left to do is to continue testing and make any iterations I need based on the results. This next week, I hope to move into more testing and validation in order to show that the seat module is robust.
Now that you have some portions of your project built, and entering into the verification and validation phase of your project, provide a comprehensive update on what tests you have run or are planning to run. In particular, how will you analyze the anticipated measured results to verify your contribution to the project meets the engineering design requirements or the use case requirements?
I will continue to run tests on how accurate the lean data actually is. For this, I plan on going to techspark and using calibrated weights that will be placed on the sensors as a person is sitting in order to simulate a lean. I will then see how much weight needs to be shifted in order for a lean to be registered. I also will leave the weights in each position for 10 minutes – to ensure that the averaging of data will still detect a lean even after an extended period of time. This will ensure that any noise did not impact the overall performance of the module. Like previously mentioned, I do not think it will be 0.5 lbs, but I do think it will be much better than I originally thought. This is due to the averaging of all the sensors, plus a change in the actual lean detection algorithm.
I will also have a bunch of different users sit on the chair and simulate leans in different directions, to ensure that I am able to catch leans on people who are not me. Since I mainly used my data when making the algorithm, I will probably have to make some minor changes. I will also be saving the data points of each person to a csv file to analyze and use for possible changes.
I will create a google form for these users to fill out, which will just ask the user how comfortable they found the seat module, if it interfered with how they were sitting, and if they found the module accurately detected when they leaned. These will be rated on a scale of 1-5, with 5 being the most desirable outcome.
I will also myself just use the chair while working for around an hour, while saving the data. I will also video myself from the side, which should help me see when I actually lean. I will then compare the results from the saved data with the video timestamp to ensure that I accurately detect when I am leaning. This should give some extra data I can use to ensure the algorithm is correct.



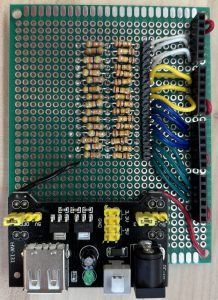


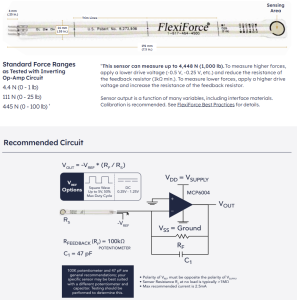
 This was done just using a multimeter and a basic voltage divider circuit. Now that I know that the sensors work, I can focus on wiring them up to the ADC. I was also able to find better documentation on the adafruit ADC I purchased, which help me write some preliminary code to connect the ADC to the rasPi.
This was done just using a multimeter and a basic voltage divider circuit. Now that I know that the sensors work, I can focus on wiring them up to the ADC. I was also able to find better documentation on the adafruit ADC I purchased, which help me write some preliminary code to connect the ADC to the rasPi.