What are the most significant risks that could jeopardize the success of the project? How are these risks being managed? What contingency plans are ready?
- One risk is the integration between the CV for blink detection and the browser extension. Right now, the CV works (and can detect blink rate in different conditions) but is not directly integrated with the browser extension. This integration is a risk, as we have never connected CV to a frontend. The mitigation plan we have in place for this is trying out different ways to communicate between the two. This includes using cookies, an http request with the server, or some other strategy.
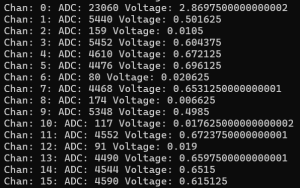
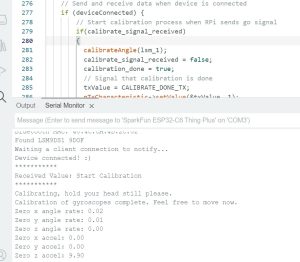
- Another risk is the drift on the sensors. Both the gyroscope and the pressure sensors do not have 100% accurate data. Instead, the values at any given point will shift. For the neck angle monitoring, mitigation with using a more elaborate calibration procedure is being done. As well, Lilly will attempt to implement some sort of low pass filter in order to remove as much noise as possible. On the pressure sensor end, mitigation is being done by averaging out the past minute of data before sending to the extension, thus ensuring higher confidence that the data calculated was accurate. As well, the sensors themselves have been moved into different positions to try and utilize them so that as much useful data can be collected as possible. Just as with the neck angle, Kaitlyn will also implement a low pass SW filter if needed.
Were any changes made to the existing design of the system (requirements, block diagram, system spec, etc)? Why was this change necessary, what costs does the change incur, and how will these costs be mitigated going forward?
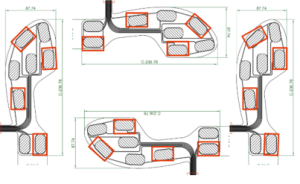
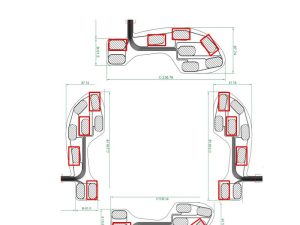
Instead of using the original design for the pressure sensor mat, the sensor pads were slightly spread out and the sensor map of which sensor was being used was changed. This was necessary in order to get better lean data and more accurate results when trying to correct the users posture. No costs were incurred since all that was needed was changing the wiring between the sensors and the protoboard.
Provide an updated schedule if changes have occurred.
As of right now, no schedule changes are needed. We plan on having the individual components fully ready for the interim demo, with at least part-to-part integration completed.