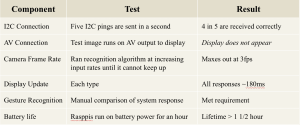
The week of carnival (right before interim demo), I coded the I2C integration with the display renderer, which has the raspi receiving and processing signals from the gesture recognition output from the other pi. We discussed this during the interim demo, but at that point there were metallic connection issues so it did not work. As of this thursday those issues have been fixed by Rebecca, and the pis were handed off to me to debug an additional issue with the display pi not showing up as an I2C slave, probably due to a minor issue on the script. I have since taken the pis and have to debug this issue tommorow, but since then I have been working on the wifi connection between the display pi and the webapp, which I will discuss in a later section of this report.
Right after interim demo and at the beginning of this week, Diya and I worked on writing up the features, details, and user / technical requirements for the analytics feature. We discussed this with Tamal and Josh, and continue to further refine this.
This week, my primary work was getting the WiFi connection between the display raspi and the webapp working. Essentially, we want the user to click a button on the webapp and send information about that particular recipe such as steps and ingredients to the glasses, that can then display that information. And after the cooking session is done, send information about the stats of that session (time spent, steps flagged) to the webapp.
Originally, we did not do enough research on how exactly to do this and thought to use bluetooth. Then, realizing this was not feasible for an AWS deployed webapp (our original plan), we switched to possibly deploying the server on the pi itself. We should’ve done a lot more research admittedly way before this, but this is the sitatuion we were in.
Before starting on this task, I did several hours of research on how to best do this, as I have never worked with a raspi before, rarely ever worked with networking, and certianly never deployed a server on a raspi. I quickly realized this was not very feasible on a pico and also not very necessary or scalable, and realized that it would be a better idea to simply have the raspi and the webapp have a websockets connection.
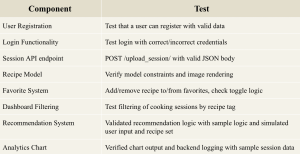
Implementing this involved setting up daphne and channels for websockets requests on the webapp, setting up the websocket routing and comsumer commands, and adding the feature to send information over to the pi. Then on the pi side, sending an initial connection request to the webapp on boot up, setting up a listener on the display script, and listening for and displaying information that was sent. This fully works, and now the pi and webapp are connected and can send and receive info from one another over WiFi.
While doing this I realized that something happened with our webapp, probably because of merge conflicts, that has caused diya and I to have very different model definitions on the webapp (my guess is that when diya started working on the webapp frontend some of the models I made did not get pushed / pulled, and Diya wrote additional definitions for these models that do not match with the old db). This has caused our database to be messed up, and a lot of recipes have mismatched ids and feild names. I am meeting with Diya tommorow to sort this out, should not be too bad hopefully. I have also noticed I am having some issues where my local git clone is not letting me pull (repo does not exist error), which I hope is just a local issue. I can probably delete the clone off of my computer then reclone, but I am waiting on confirmation from my teammates that this is a me issue and not a repo issue.
This coming week, we have a lot of work to do. For me personally, once this issue is sorted out, It will be relativley easy to display the info that the webapp sends to the glasses and vice versa, so we can demo this on Monday. Then, I will figure out the I2C bug. After that, I will see where else the team needs help. I assume this will be on the analytics feature on the webapp, so that will be my task for the next week including random things that will inevitably come up here and there with integration.
I feel like I have done a lot of work this week especially on the WiFi connection so I feel on track in that sense, but I definetley have a lot of work to do in these coming weeks!