
This week we have been working on some final fixes for all of our individual components. Currently, most components are looking good and we are conversing to make sure that there is an alignment between our components for the purpose of integration. We have also been discussing on how we want the interim demonstration to go and how we will design it.
Joe’s Status Report 29th March, 2025
This week I have managed to get most of the web application to be running. I’ve added some pictures of some of the web pages below. Right now the processing algorithm is still struggling a little bit so I’m continuing to work on that, hopefully getting it done by the interim demonstration. I have yet to complete integration with the ML model but it seems like this part should not be too difficult.


Nicholas’ Status Report 29th March, 2025
I successfully trained the model. However, the data fidelity was not what we wanted, so we are exploring various data augmentation options, and possible alternative datasets, to get the model working the way we intend it to. This issue has caused the expected output of the ML Model to be different than what we anticipated, so for the Interim demo’s, we will not be integrating with the Processing Algorithm. I am also currently working with Lohith to get a version of the model on the Jetson so we can start working on using video feed instead of just images.
Lohith’s Status Report for March 29, 2025
This week, I have received both the camera mount and the camera. Later today, I will test the functionalities of both and see if I can integrate it smoothly with the Jetson. Much of our integration steps for the interim demo will take place tomorrow. Also, I have laser cut the parts for the box that will house our camera mount and jetson. I don’t have a picture right now since I’m on campus, but I can update this post at some point with a picture. This is a basic prototype model that was made out of cardboard since scrap wood was not available, though for our final version I will use wood. The dimensions are perfect to fit our Jetson, and the camera mount wire is actually very long, so I imagine I can wrap it inside the box and then attach the camera. Once these pieces go together, we will have a very basic working implementation.
Team Status Report for 22nd March 2025
For this week, we have all been working individually on our components. Joe has managed to get basic web functionality up. Nicholas has finished checkpointing the ML model and has been working on integrating the ML model with a dummy processing algorithm (since the processing algorithm is in the works) for testing purposes. Lohith has been working on completing the camera unit so that by the end of next week we are ready for pipeline testing. We are planning to start integrating the ML model into the Jetson next week.
Joe’s Status Report for 22nd March 2025
This week I managed to get the web server to function with the desired functionalities so my hope is that by next week I will be able to begin hosting it on the Jetson and try to connect to it from a web device. Currently the processing algorithm is still in the works so I’m also hoping to finish that by next week. Hopefully I will also be able to get integrate the processing algorithm into the web server by then since integrating those should be fairly straightforward. After this week, I’m hoping to start overall pipeline testing.
Nicholas’ Status Report 22nd March, 2025
The model has almost finished checkpoint training. Due to various issues we encountered, we had to restart training, and have trained our model 7/8ths of the way (roughly as of writing this) and will finish it during this week. I have also been working together with Joe to start integrating the expected output of the ML Model with the Processing Algorithm. Even though the model is not done training, the scaffolding needed for it to interact with the Processing Algorithm is something I was able to focus on and finish up this week.
Lohith’s Status Report for March 22, 2025
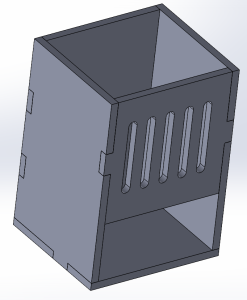
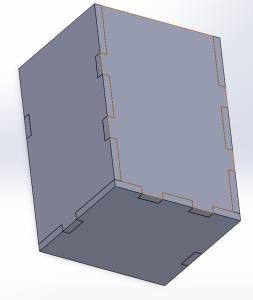
This week, I have finished most of the model for the product that will house the camera and the jetson device. Pictures are attached. Each face has a bit of a jigsaw pattern so that a preliminary assembly can be done for prototyping without actually using a permanent solution like hot glue or screws. I intend to use wood to laser cut the material, so once I learn to how access wood, I will do so. The jetson will fit in the bottom compartment (almost perfectly), and the camera mount will stick out of the top. There will be a small platform inside the box that will act as the mount for the camera mount to attach to, so once I pick up the camera mount on Monday, I can configure how that will look. The holes in the box back side are for ventilation. I’m not sure if that would even be a concern, but it’s good to make sure, in case we happen to close the top for whatever reason. Wires will run from the bottom opening (where the jetson would be inserted), and this consolidation will make the product usage much easier. I may design a quick way to keep the jetson in place during operation.
Lohith’s Status Report for March 15, 2025
This week, I have been getting back on track on my tasks after spring break week. Finally, we have settled on the gooseneck camera mount, which is the most effective way to stick the camera and then adjust it. The previous idea of a lid is very error prone and involves a lot more iteration, since it relies heavily on the materials used for the hinge as well as the design. The gooseneck mount should work better. This means that we need a platform inside the box to attach the mount to. Also, to attach the box, I plan to use a jigsaw structure, as this will support the structure best, and gives a degree of portability in case the user wants to disassemble and carry it to places. By either next week or the one after, I should have a printed prototype of the box.
Team Status Report for 15th March 2025
The team met together this week to discuss the comments on the report and how we could improve the design of our system based on the comments. We realized there were some ambiguities and holes in our design and articulation of our ideas and noted these for updating in the final report.
Currently work is going as planned and no major changes have been made to the schedule or the design of the system, albeit some additional low-level considerations during implementation. The most significant risk right now is whether or not we can tune the ML model sufficiently to reach the accuracy requirements, but currently based on literature this does not seem likely.
We have currently made some plans as well to work on part 3 and part 4 of the ethics assignment. Right now we have all individually started reading through it and will meet tomorrow to figure things out.