Accomplishments this week:
This week, I improved the assembly of the cane by securing everything in a less temporary way. This included some woodworking for our camera holder and some additional aspects to hide our wires and such. I also improved the haptic feedback responses to be much stronger. The second half of the week was spent testing our prototype and putting together parts of our final presentation.
Reflection on schedule:
On schedule!
Plans for next week:
Over the next week, we will be completing the rest of our testing and documentation and getting some materials together for our demonstration. This includes stairs, figuring out lighting, and putting together our poster.
New tools:
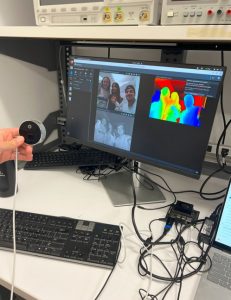
On the hardware side, I became familiar with Adafruit’s QT Py RP2040 microcontroller, and the DRV2605L haptic driver, which required us to learn how to communicate between these two devices and with the jetson. Additionally, I learned how to use FSRs to trigger our threshold for the CV.
To gain this knowledge, I relied heavily on informal learning strategies. I used GitHub example code, Adafruit and NVIDIA forums, and documentation pages to understand how each component worked and how to debug integration issues. We also used trial-and-error testing and peer troubleshooting within our team to identify bugs and refine our software logic, especially when integrating the camera, haptic feedback and FSR with our Jetson.