
This past week I spent time doing research on the software block diagram of the project. We realized this project is much more complex than we originally thought. The main concern I was researching was how to transfer images from the glasses to the cloud. My original idea was to do it through the blue’s notecard onto notehub which can connect to AWS. However, I found out that blues notecard cannot send large files and instead needs to send images in chunks. We can also send through raspberry pi but after research, I was not able to find out how large of an image we can send. Therefore, we are going to have to do tests to determine what size of image we can send. If we cannot send a large image file, we will try to compress our image down to 8kB as that is the max file size we can send in one chunk through blues notecard. I also practiced my presentation this week as I presented on Monday. We have also received our parts and I have begun brainstorming on how I will start the implementation. I am going to start with the image capture trigger as that is the start of the software pipeline and work from there.
Rohit’s Status Report – 2/22/2025
This week, I focused on our web app dev. I spent more time researching and implementing alternative cloud solutions after learning about the AWS reimbursement limitations. I’ve explored the Google Cloud Platform as our backup option, setting up an initial testing environment to ensure that we can transition our project easily if needed.
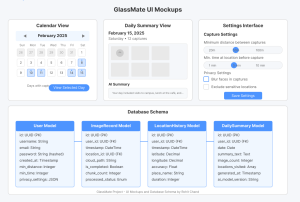
For the web app itself, I’ve completed the initial Django project setup with basic URL routing and view templates. Additionally, I have also completed the first version of the calendar view interface which will be our main entry point for users to view in their daily summaries.
I also started working a bit on the integration with Google Maps API for location display. I’ve successfully implemented a basic map component that can display location markers based on coordinates. This will help us provide context to the captured images in the daily summaries.
During testing image compression, Dhruv found out about the some of the limitations of the Blues Notecard’s file size. Given these challenges, I’m researching on solutions on the server-side to potentially handle fragmented image data and then efficiently reconstruct the complete images and store them into our database.
My progress is slightly behind due to having to spend some time researching a new cloud infra in case we may need to pivot our project there. However, I can catch up by working on the frontend and backend dev simultaneously.
Below I’ve attached a screenshot of our UI mockup overview and database schema designs thus far.
William’s Status Report for 2/22/2025
This week, I spent some time ironing out the design review slides. In addition, I received the parts of Arducam, Raspberry Pi, and Blues Notecard. With the given timeframe, I went through the tutorials of starting the process of flashing the RPI Pico W.
I think my progress is currently still a little bit behind. I am hoping to get some more embedded development progress done before spring break. The aim is to get at least one of the parts to be connected/communicating with each other before start of break.
The deliverable I hope to complete in the next week is finish succesfully flashing the pico W and figure out how to connect the pico W to existing wifi.
Team status report – 2/22/2025
The most significant risk that could jeopardize the success of the project is more on the software end. We were recently informed before our proposal that the course staff typically cannot reimburse software purchases with AWS. As for resolving this issue, we will first use the “free tier” from AWS Educate. If this does not end up working out, we will try using Google Cloud Platform.
In regards to the hardware end, we have pretty much finalized and hope to get more into the development process of the RPI Pico W and the integration of the various components.
Finally, there are currently no changes that will be made to the existing design of the system.
Team status report – 2/15/2025
Weekly Status Report (2/15/2025)
The biggest risk that can currently jeopardize our project is not being able to send data between the hardware and cloud. We are trying to do a hotspot connection to transfer images from Arduino cam to cloud. However, we do not have experience in this area so we are not sure how difficult it is. To prevent these risks, we are thinking of many options to send data to the cloud. Our first option is buying a raspberry pi Pico with a blues Notecard. This blues notecard has hotspot and a cellular data card. The cellular data card has a limited data capacity so it won’t last forever but we know it would work. The other option is getting a blues notecard with only wifi. This means we would have to connect with hotspot. If this does not work, the raspberry pi pico also has wifi so we can try hotspot from there. We will get one of these options to work.
From last week, we changed the battery we are going to use because we realized that the raspberry Pi pico needs more power than we thought. It did not cost us that much. Other than that, are design is the same and we plan to continue forward. We are continuously analyzing our designs to make sure that we run into minimal roadblocks.
We have also been working on the design presentation as a group and we are ready to present.
Part A was written by William Wang
GlassMate makes it easier for people to remember and reflect on their daily lives without the stress of manual journaling. By automatically capturing key moments and summarizing them, it helps with mental well-being, especially for those with memory challenges or busy lifestyles. Having a clear record of daily activities can bring a sense of organization and mindfulness, reducing anxiety and improving self-awareness. For individuals who rely on routine, such as professionals or elderly users, GlassMate offers a way to track their days effortlessly, helping them feel more in control of their time and experiences.
From a safety perspective, GlassMate provides passive location tracking that can help users retrace their steps if needed. Whether it’s remembering where you left an item or recalling a past event, having an automated log enhances personal security. By reducing the need for manual note-taking or constant phone use, it also minimizes distractions while commuting or moving through public spaces. In terms of welfare, GlassMate creates an accessible and low-effort way to preserve meaningful memories, ensuring that important moments aren’t lost in the busyness of everyday life. It’s a small but impactful tool that improves peace of mind and personal well-being through technology.
Part B was written by Dhruv Dixit
GlassMate makes it much easier for humans to document their lives and make it more accessible for people to see what they do throughout the day if they live busy lives. It is also a great use case for people that have memory impairments so that they can stop living life forgetting every moment. It is also a great use for families or people traveling to document their journeys effortlessly and not having to pull out the camera every 2 seconds.
This product covers privacy concerns by allowing user’s to choose when and where they take pictures (with setting). Economically, this product can also have an impact on other products being made in the industry that involve journalling. A shift towards products that allow for effortless documentation can enter the market.
Part C was written by Rohit Chand
For production, we would have to use bulk purchasing of components and automated assembly lines to reduce per-unit costs while maintaining proper quality standards. The manufacturing approach would focus on lightweight, durable materials that can be sourced reliably and assembled efficiently. Distribution can be done by partnering with existing technology companies and eyewear manufacturers so that we can use existing channels to minimize infra costs and maximize our market reach. We believe that this kind of model reduces our distribution overhead while getting us into the market. From a consumption perspective, we would implement a tiered pricing strategy with a base hardware cost of around $200-300, complemented with a subscription model for cloud storage and AI features. Additionally, scalability is built into the product itself as for the modular design that allows for easy component upgrades.
William Wang’s Status Report for 2/15/2025
This week, I worked on the design slides and ironing out the details of the hardware side of our project. After discussion with the TA and our professor, I sent out the order list for the hardware side of our project for development.
In addition, I also did some power research on what is needed to supply our system components. After some discussion, we decided to power the pico with a usb (5[v]) which is connected to a power bank. By doing this, we are in the recommended range of 3.3-5.5[v] for the Pico while providing enough power for all of the components.
We our slightly behind on our project schedule. I was hoping to get started with the microcontroller development with the RPI Pico by this week, but unfortunately we still have to wait for the parts to come. There were also no leftover RPI pico W in the inventory. I hope to get the RPI Pico as soon as possible to get started with the hardware development of the project next week.
My deliverable next week include a visible start to the Pico’s technical development, and hopefully figure out how to connect the device to cloud if the Blues notecard arrives in time.
Rohit’s Status Report – 2/15/2025
This week, I focused on web application development and cloud infra setup. I was able to build an initial Django backend structure and setup basic database models for storing user data, images, and location information. I did more research and documented our approach for AWS S3 integration for image storage. Additionally, I started to work on the database schema so that we have an efficient design for image retrieval and location data storage.
From a web design standpoint, I created some initial UI mockups using Figma. We plan on reviewing these mockups as a team and make any adjustments as needed. The main struggle here has been creating the calendar view page, as this page will be the most interacted with. How should the functionality be? What data should be presented with users? Both of these questions play a big role into what the UI will appear like.
According to our schedule, we are slightly behind on the web app development. The delay is primarily due to waiting for the hardware components to arrive for full integration testing. While a lot of the basic setup is ready, I plan to catch up by: creating mock data endpoints to simulate hardware integration, parallelize the frontend and backend dev, and set up the AWS infra ahead of the hardware arrival.
Next week, I plan on completing a basic setup of the AWS S3 bucket, implement the initial version of the calendar view interface, and create some basic API endpoints for our location data processing.
Along with all the above, I also collaborated with Will and Dhruv on the design presentation and documentation.
Dhruv’s Status Report – 2/15/2025
This week I did a lot of work on the design proposal and researching the pipeline of the software section. In specific, I researched the blues notecard and raspberry pi nano and realized that they run on a voltage between 1.8 and 5.5 and need an average voltage of 3.7. I also finalized that location coordinates are continuously sent to AWS and if the distance from start point is greater than 20 meters, a signal is sent to a lambda which executes a picture capture. This will be done by setting up an AWS IOT endpoint. Once the image is captured, it will be sent back for storage in AWS S3 and will be tagged with location and time. Whenever the user requests an LLM summary at the end of the day, we will query a fine tuned LLM (llama 3.2) and return the output to the user. I also worked on the design presentation such as making the design for the software side. I am also presenting today so I practiced what I am gonna say and also prepared potential questions I could be asked.
Status Report – Week 1 (Rohit)
This week, I focused on researching and planning the web application architecture and database design.
Frontend Research and Planning:
I primarily evaluated Django’s server-rendered HTML/CSS approach for the web interface, researched responsive design patterns to ensure 30-second page load time, started planning the calendar-based interface for daily entries, and began sketching some initial UI wire frames for the daily summary view.
Database Architecture:
Regarding the database, I investigated a schema design for storing the user diary entries, associating images with timestamps, location metadata from Google Maps API, and LLM-generated summaries. I also researched heavily on efficient storage mechanisms and retrieval patterns for image data using AWS S3.
LLM Integration Planning:
I explored AWS Rekognition API capabilities for image processing and started to work on an initial design for the data pipeline for processing daily images and generating summaries. I also looked into approaches for combining images analysis with location data for better context in the summaries.
The main challenge that I am anticipating from my research this week is optimizing the database queries to meet our performance requirements, especially when fetching and displaying multiple images and summaries for a single day’s view. I anticipate we will need to implement some kind of efficient caching system to address.
Status Report – Week 1 (Dhruv)
This week, I did a lot of work on the slides and presentation. I spent many hours researching the design of our product to figure out what devices to use. In particular, I spent time researching how to have constant connectivity to the cloud to have continuous image transmission. I also spent time refining the requirements for our hardware and software.
My role on our team is on the software side. Therefore, I also spent time researching how the location would work and designing the system for getting images processed. In particular, I decided that we would like to use something like AWS S3 to store compressed images daily. When the user wants their summary, a function will fetch all files under the S3 folder for the current day and feed it into a multimodal LLM to handle summarization. We will also tag each image with a timestamp and google maps location to get an accurate summarization of the day!
Other than working on the slides, I began to brainstorm on how exactly to attack this problem. We also began thinking of what orders to put in for our device.