
This week I spent most of my time working on the CV component of the product. I found a very rudimentary way to locate obstacles and that was through Canny edge detection. There are a lot of different factors for preprocessing the image before it undergoes the algorithm that can skew a lot of what is considered an edge or not. I followed some online resources that gave a very rudimentary look at getting edge detection to work though OpenCV python. This is what some of my preliminary results look like.
Original Image:

Edge Detection:
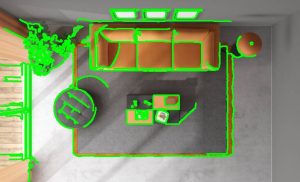
Here its pretty clear that the algorithm is effectively doing edge detection but it now becomes kind of hard to determine what is a relevant edge and what is not. it does a good job of marking the plant, lamp, sofa, and tables respectively however the rug is still considered an obstacle.
For the next week, I want to see if there is any more accurate edge detection models, as this one has some minor flaws in detection, and seeing if combining the results of edge detection with something like YOLO might make it easier to differentiate between something like a rug and a legitimate obstacle like a sofa.