This week, I was working with the UWB tags/anchors. However, I think we didn’t order the optimal parts as there is an existing dev kit which would make the connection/communication with the Raspberry Pi a lot simpler, with a simple USB connection. I researched two products, the DWM1001C-DEV and the DWM3001CDK. Based on the two product descriptions, I decided on the DWM1001C-DEV since the 3001CDK provided unnecessary precision at the cost of additional configuration and more complicated setup.
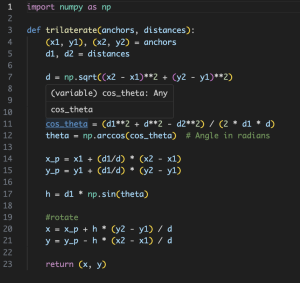
While I am waiting on the parts to arrive, I have begun writing code for what I can. Firstly, I wrote the trilateration function, which is how I will localize the user on a 2D grid after I receive the distance measurements from the anchor. I use the distance between the anchors as well as the users, along with the law of cosines, to trilaterate the user. Furthermore, I wrote some basic Python scripts to connect to the device based on online references, but I suspect this will need debugging once the parts arrive.
The progress is a bit behind as I ordered the wrong parts initially, but I’ve tried to mitigate this by working on what I can while I am waiting on parts. Next week, I hope the parts can arrive and I can connect and receive actual distance measurements.