
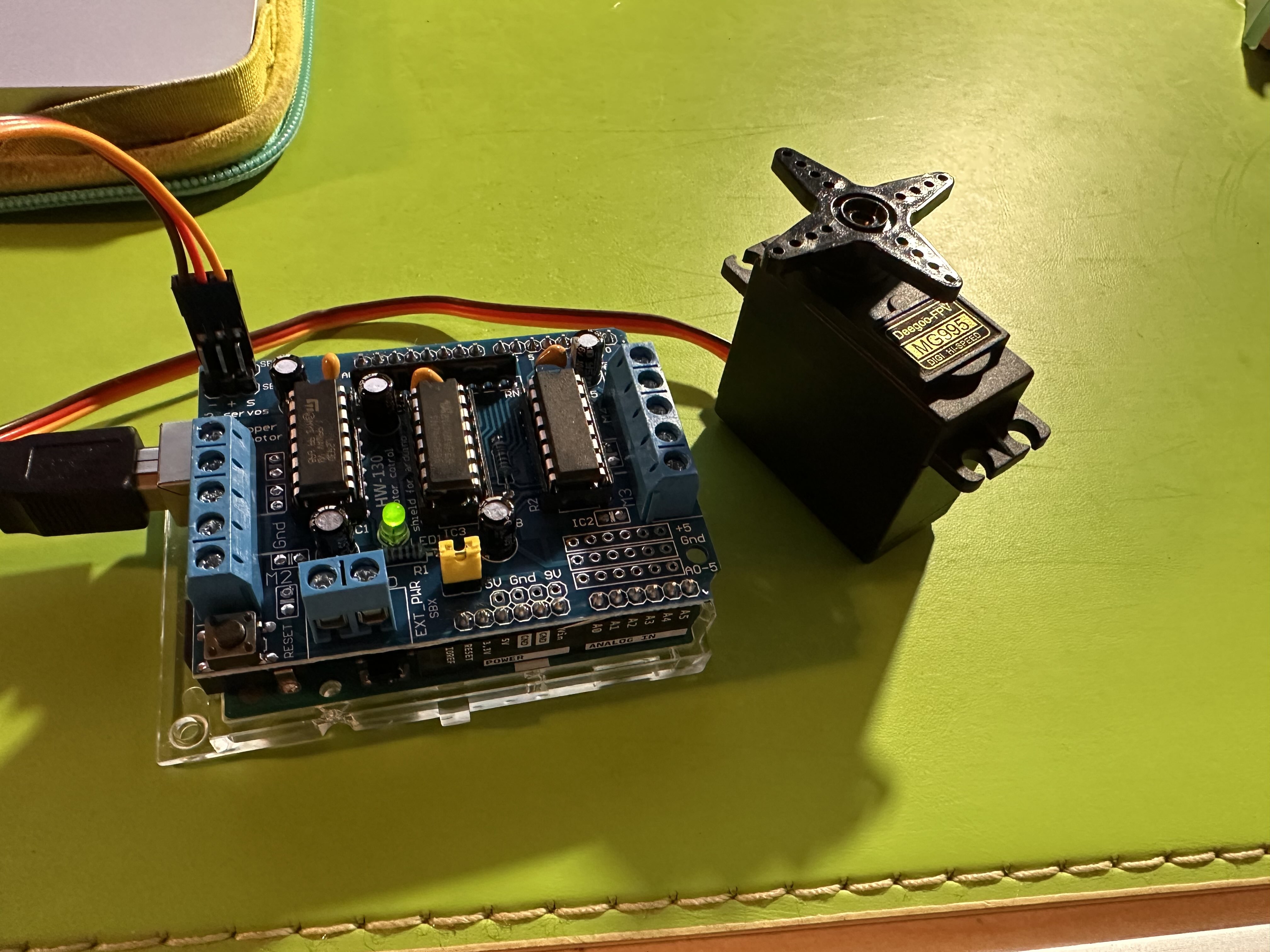
We got most of the parts required for the main portion of the project we will be focusing on (everything excluding three user input sensors), so I got to test the motors this week. I was personally surprised by how easy it was to move the servo when using the Servo.h library provided by arduino. I thought I would have to program the PWM signaling myself, but turns out I don’t, so that left me more time to add touch to other parts of the project.
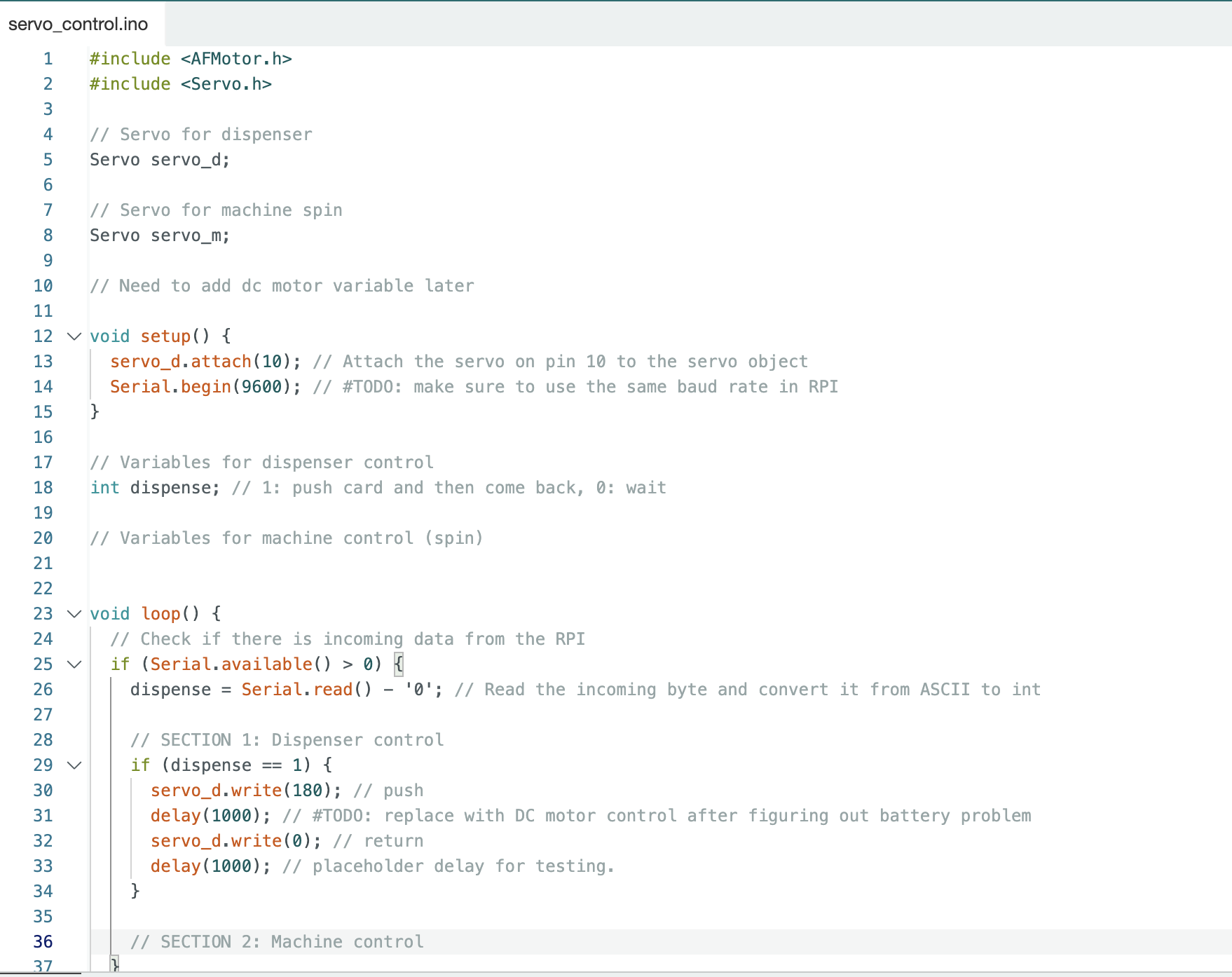
Since I already have an idea of how the communication should work between the arduino and the RPI, I quickly coded the partthat will do all the parts requiring a servo (dispenser card push mechanism, machine spin mechanism).
Considering that I cannot do much with the motors without the case to hold them together, I lended some help to my team member who is working on the CAD modeling.
I also contacted the CMU fablab in techspark to get some help in 3D printing and cutting wood for the case. I have not gotten a response yet, but I expect to get one by next week Monday. Then, I would be able to quickly design the 2d layout of each pieces of the case (this won’t take too long, since it’s just a large rectangle with some holes and joints here and there) and cut it out.
I am still figuring out the battery and DC motor, because I am personally not very familiar with the current requirements. It is written in the schematic, so figuring out the voltage was easy, but I am still taking time to understand how exactly I am supposed to interpret the sheet in figuring out the proper amp.
I also received the card shuffler, but the way it functions was slightly different from how we imagined it, so we will need to adjust our plans on how the cards that are shuffled will be moved over to the dispenser. I do have an idea of how this can be done using a servo, but we already ran out of space for an additional servo, so we will need to figure that out somehow, possibly using extra arduinos we personally have.
Because coding the motor control was much, much, easier than I thought it would be (didn’t know arduino library was a thing), I am very ahead of schedule now. I just need to get some advice in battery selection before shipping it. However, we actually have some more minor parts that we need to order yet because we are still figuring some things out.
These include: 12v battery, rubber band for the dispensing cylinder, more FRS (only 1 got shipped when we need 4 due to an error), weight sensor (figuring this one out as well to make sure to not waste money), carpet for the poker table, and possibly some set of attachable wheels (found out that this will be very useful for assisting machine rotation while distributing weight load on the servo).
So, I plan to figure out all of them next week and buy everything by then, so that we won’t have the issue of not having parts by time.