Overall progress:
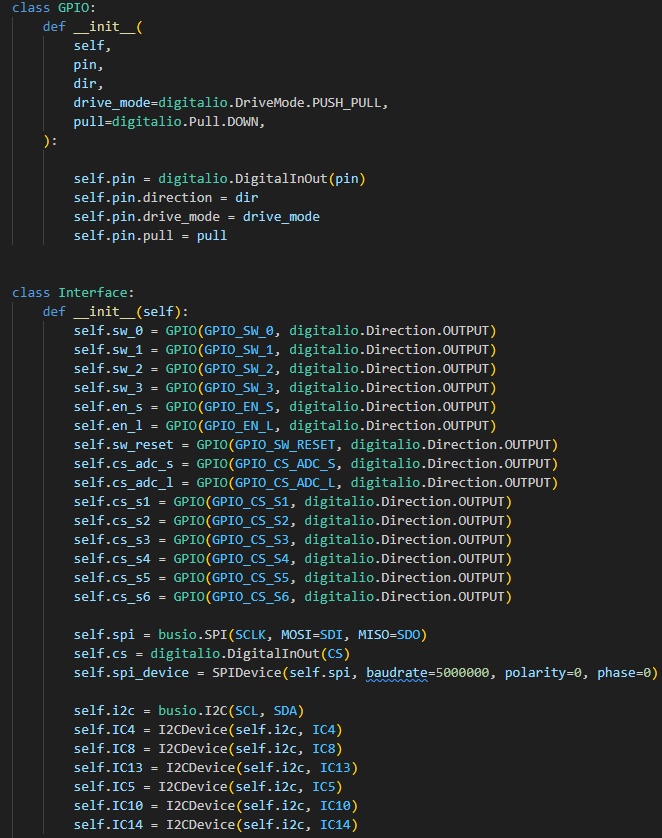
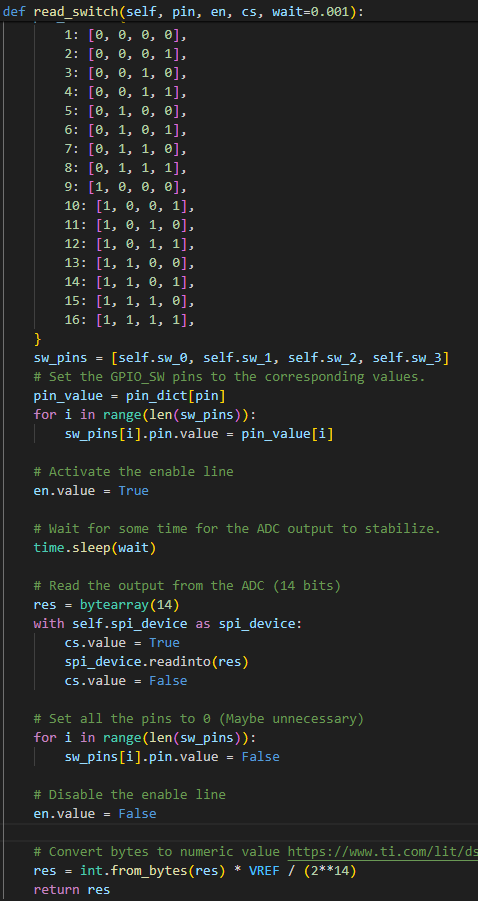
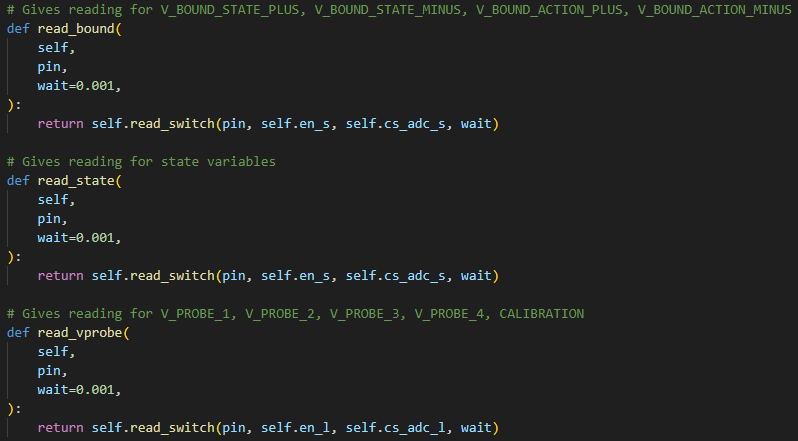
On the software side, what is left is finishing the software-hardware interface. On the hardware side, we have made the order for the PCB.
Significant risks and risk management:
Risk: Ensuring the PCB works correctly
Description: When shipping the PCB with PCBWay, we found that it was impossible for the PCB to arrive on time if we wanted it to be fully assembled due to the manufacturer unable to source all the parts. As such, we have to manually reflow parts of the PCB. This is a risk as parts might go wrong during the reflow process.
Severity: If an error happens during the reflow process, our PCB will not work intended. This will likely mean that our final product will only be in simulation.
Resolution: Unfortunately there is not much we can do to prevent this risk. We can only put in as much care as we can when we reflow the PCB.
Software tests
- Testing that the SLP solver can swing up the pendulum in multiple starting configurations.
- Comparing the solution from the SLP solver with an IPOPT solver to ensure the solution is accurate.
- Test the SLP solver with gaussian noise on theta to ensure robustness.
- Test the SLP solver with gaussian noise on theta dot to ensure robustness.
Hardware tests
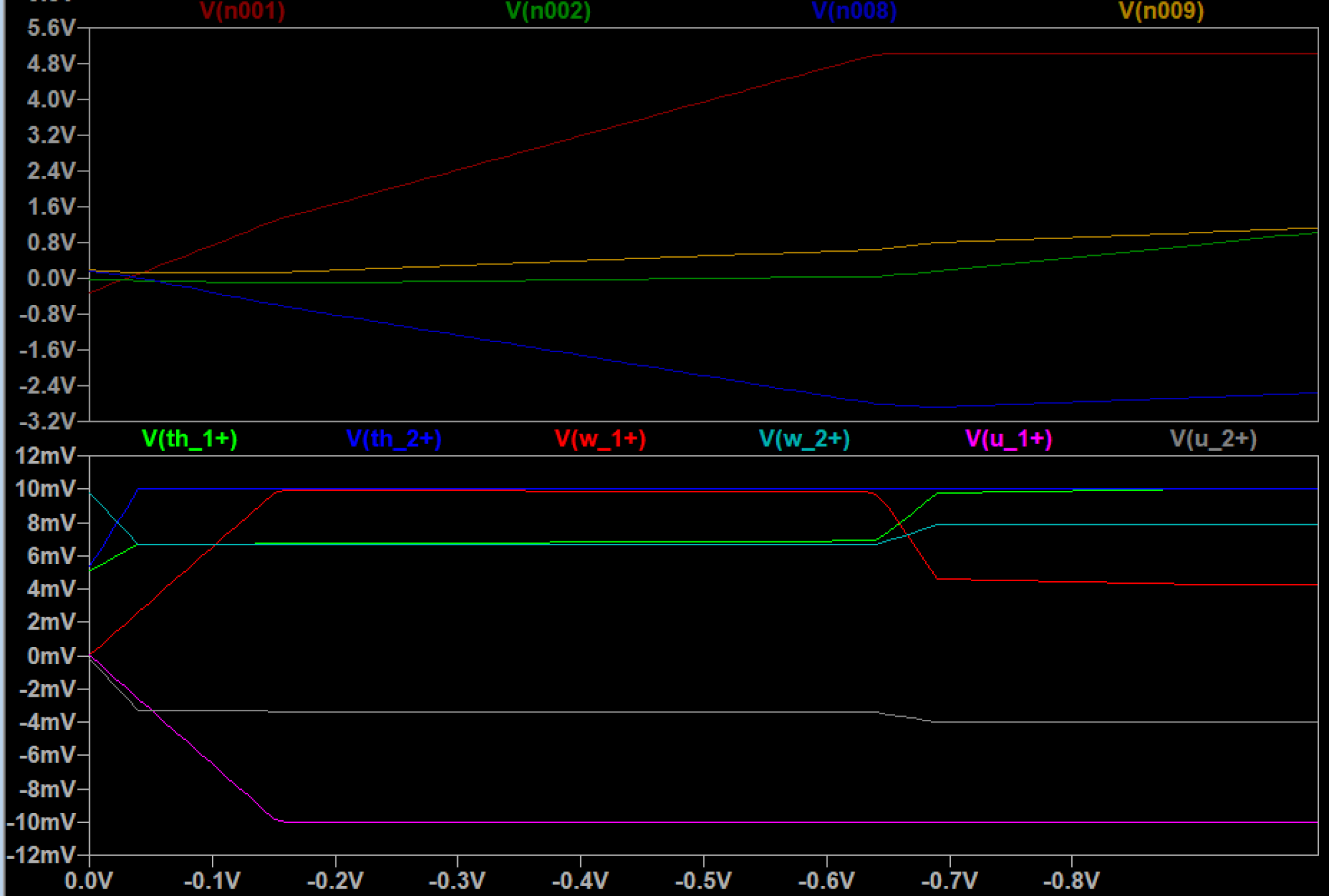
- Simulating the hardware with LPs (the first, last, and random LPs) given by the software solver and verifying that results match the software solution.
- Verifying the circuit behavior matches expectations and ensuring the operation range of the circuit lies within bounds by simulating it.
Changes to the existing design:
There are currently no significant changes to the existing design.
Changes to the project schedule:
There are no significant changes to the schedule as we are nearing the end of the semester.