Personal tasks of this week:
Task: Entire Schematics and PCB Layout
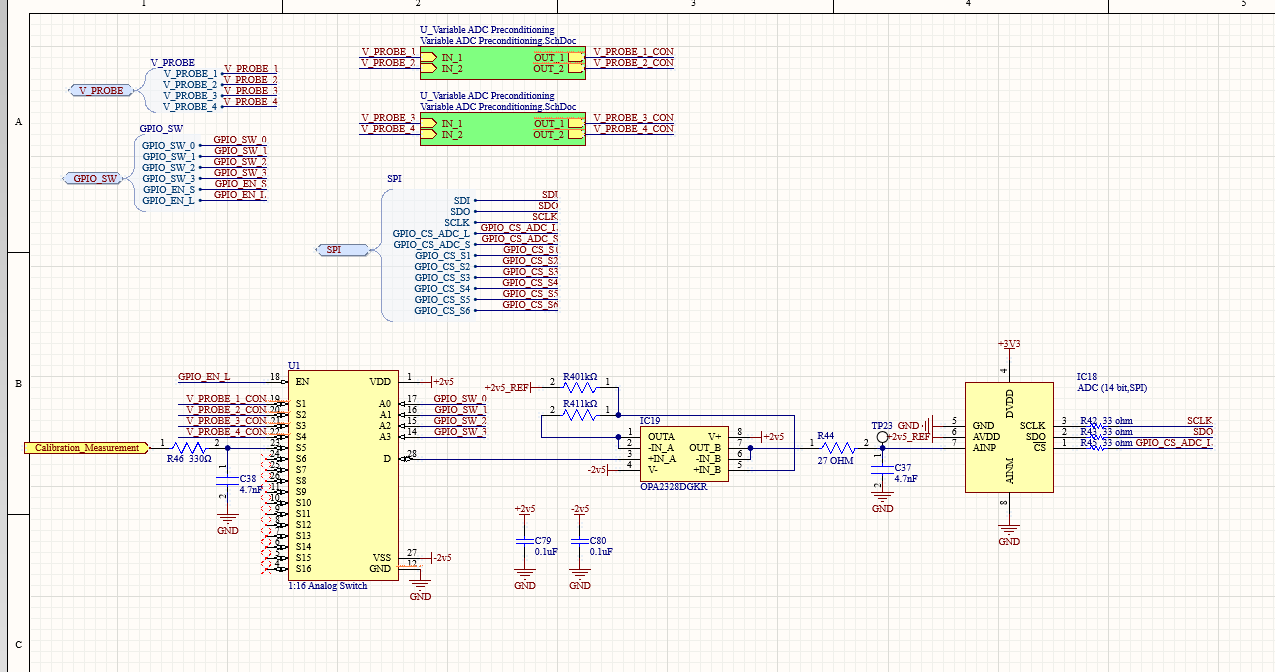
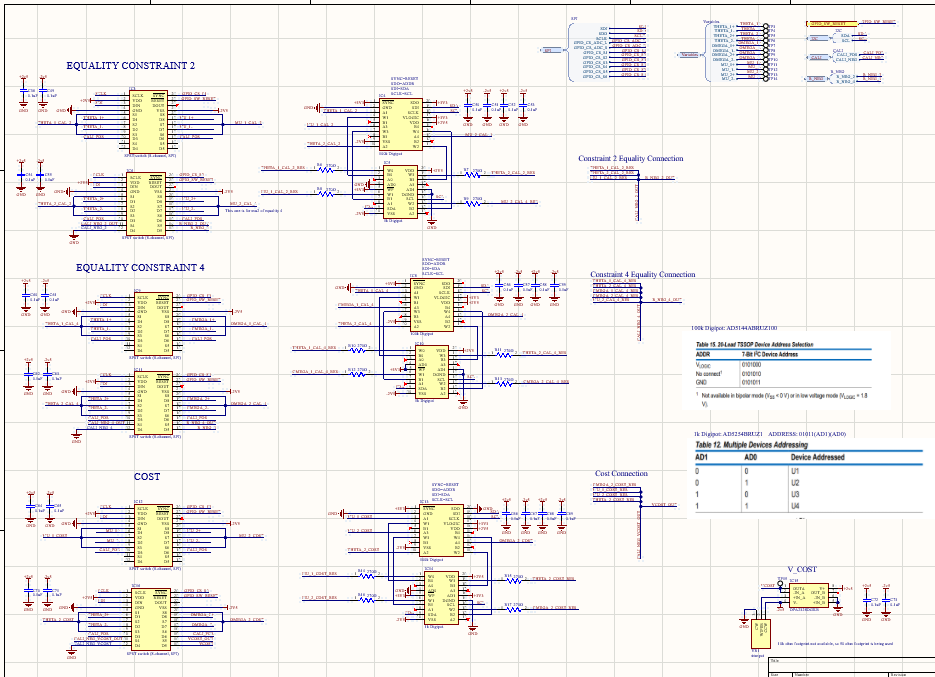
Definition: As the final pcb was due for manufacturing, the entire pcb schematic and layout needed to be finished from the entire design.
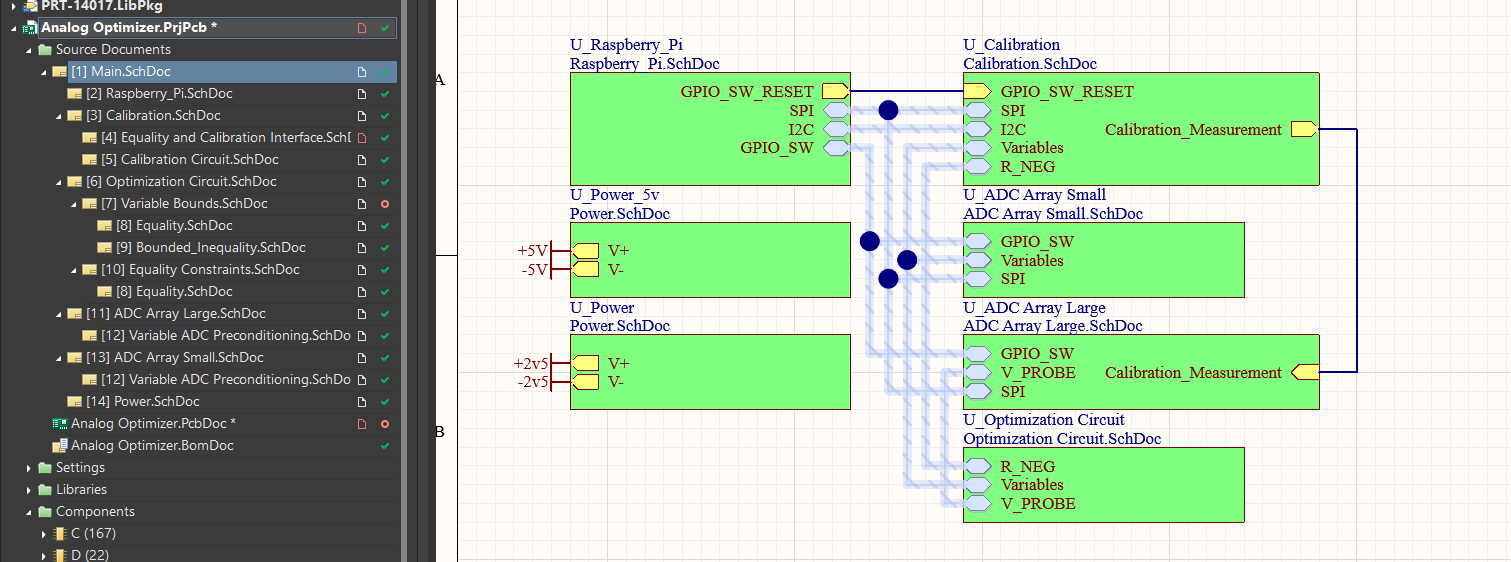
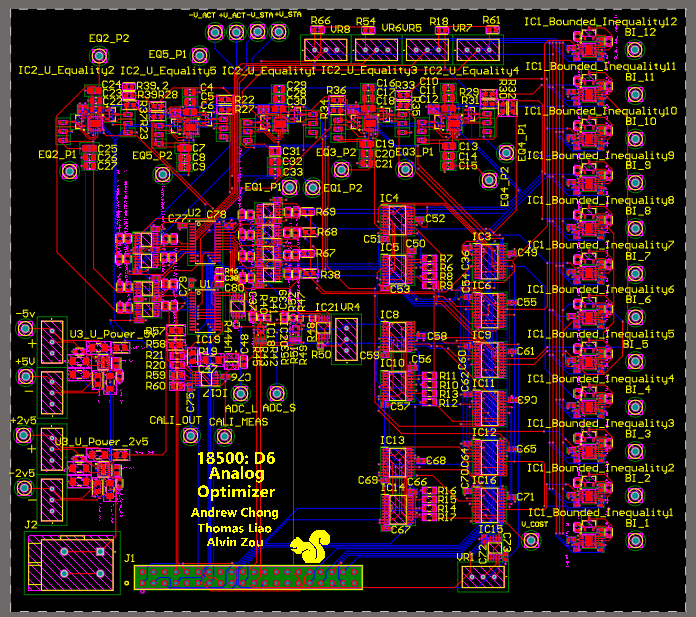
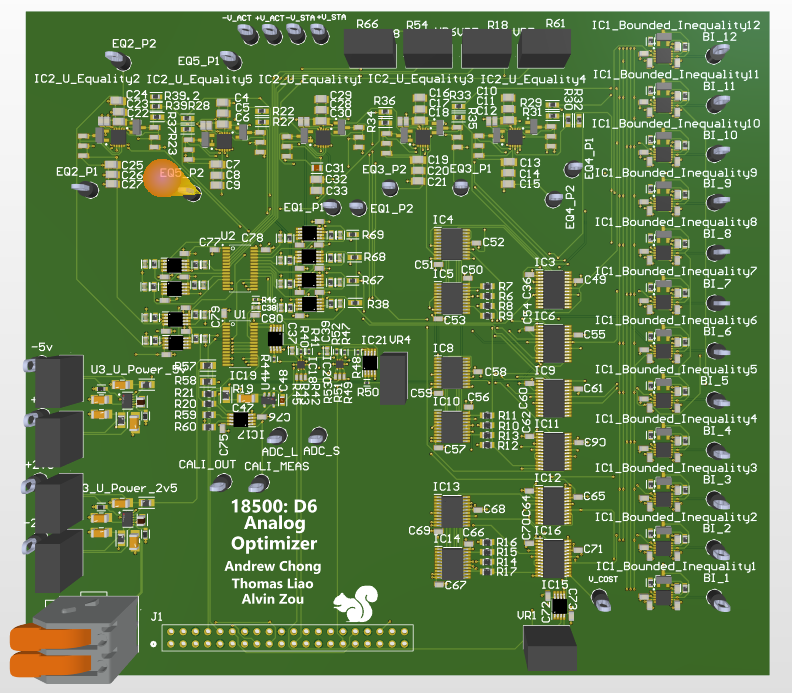
Completion: The task is completed. Thomas and I were able to finalize all aspects of the schematics first to ensure that the pcb will work. Thomas was a huge help in figuring out resistances, capacitances, and general wiring for the ICs. Afterwards, the entire layout was also completed. Here is the 2d and 3d view of the layout in Altium. Since the schematics are too large to view on one page, here is a link to the schematics: https://drive.google.com/file/d/1xAiFV6w-DaRna5lD9I2hjO9rPJXy43xM/view?usp=sharing
Next Steps:
There are no next steps on my end.
Overall progress assessment:
My progress is completed , but the overall progress of the team is behind schedule, as we need to manually reflow the pcb instead of getting it assembled, since the manufacture time would have been too long.