
Our design report is complete and is uploaded under the “Design Review” tab. Attached you can find a copy: Team_C6_Fernau_Gardner_Hassabelnabi_design_report
Isabel’s Status Report for 2/26
This week, most of my effort was spent towards coming up with a design for our calibration system. I took a look at some research for VR calibration (chrome-extension://efaidnbmnnnibpcajpcglclefindmkaj/viewer.html?pdfurl=https%3A%2F%2Fciteseerx.ist.psu.edu%2Fviewdoc%2Fdownload%3Fdoi%3D10.1.1.140.3179%26rep%3Drep1%26type%3Dpdf) and it gave me an idea to draw up the plans for a geometric calibration program that pairs with our CV to determine the user’s position in space in relation to the wall and projector. During the second half of the week, I have also been putting some work into the design report, particularly the requirements, architecture, and implementation sections. Currently I’m slightly behind schedule with respect to the pySerial code, I expected to have a program file by now and I have only code samples, but I am also slightly ahead with regards to the calibration plans. It might be easier for me to make the end-to-end pySerial program(s) once I get a better idea of the hardware and CV endpoints. For next week, I hope to get both some pySerial interfacing and calibration drafts into arduino code as we begin working in class, and also finish out my parts of the design report by Monday/Tuesday.
Rama’s Status Report for 02/19
This week, I started designing the projector system. The goal is to have the projector move at the same speed and direction as the person’s head. I looked into using servo motors with a mount that allows two degrees of freedom. The positives of using servo motors are that they are very compatible with Arduinos, allow for quick movement, and they do not draw too much current. However, we are aiming to move a projector that will be around five pounds so we needed something more sturdy. Also, it is difficult to control the vibration. Then I found a pan and tilt system that is commonly used for robotic arms. It also allows for two degrees of freedom and it did not mention the dimensions but based on the video it seems to be around 6 inches in diameter. I think this will be able to support the projector and allow for fluid movements.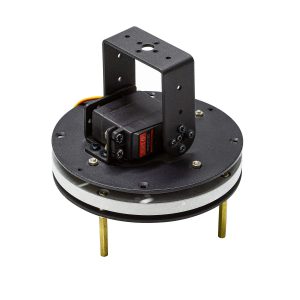
I ordered it this week but there was an issue with buying it off Amazon so it had to be bought directly from the vendor so it may take longer to arrive. In the meantime, I have been looking into backup motor options that will be able to support the weight of the projector. Also, I am planning on using pre-drilled versa frame stocks to attach the projector onto the motor and to attach the motor to the stand.
Status Report 2/12: Isabel Gardner
Since we changed our design, I’ve transitioned from researching a webapp to researching system design. To interface between the arduino and python CV, we’re most likely going to use the pySerial package. I’ve also been working on supporting parts research so we can just put in some orders ASAP.
Team Status Report for 02/12
We restructured our project to be a head tracking CV program mapped to a mechanical apparatus that will move, mirroring the user’s head, such that the projector will always be centered in the user’s field of vision. On Friday we recreated a division of labor, and are aiming to complete our draft parts list and schedule on Monday. We are meeting again on Sunday to compare our research and notes. After Monday, we will kick off our research using our new schedule and work on our slides for the next Design Presentation.
Design Proposal Slides
Our proposal slides can be found this page!