
This week, I started designing the projector system. The goal is to have the projector move at the same speed and direction as the person’s head. I looked into using servo motors with a mount that allows two degrees of freedom. The positives of using servo motors are that they are very compatible with Arduinos, allow for quick movement, and they do not draw too much current. However, we are aiming to move a projector that will be around five pounds so we needed something more sturdy. Also, it is difficult to control the vibration. Then I found a pan and tilt system that is commonly used for robotic arms. It also allows for two degrees of freedom and it did not mention the dimensions but based on the video it seems to be around 6 inches in diameter. I think this will be able to support the projector and allow for fluid movements.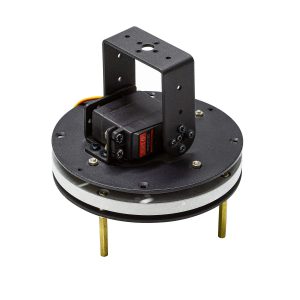
I ordered it this week but there was an issue with buying it off Amazon so it had to be bought directly from the vendor so it may take longer to arrive. In the meantime, I have been looking into backup motor options that will be able to support the weight of the projector. Also, I am planning on using pre-drilled versa frame stocks to attach the projector onto the motor and to attach the motor to the stand.