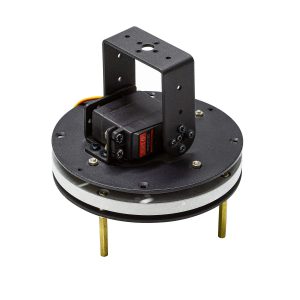
My primary focus has been on the design report and coming up with possible designs for the system as well as a more complete list of parts needed. I researched different projector mounts and stands, as well as robotics materials. I decided that we should secure the projector to a plate that is attached to the motor. From here, we can add attachments or straps to the plate to better secure the projector.
There was an issue with ordering the motor off of Amazon, so we had to buy it from the supplier and it just came in so I will be able to pick it up Monday morning. I plan on testing functionality and motor speeds and writing the base of the functions that we will need. Once the connector code is done, I can test out the functions with hardcoded inputs sent through PySerial.