
Personal Accomplishment
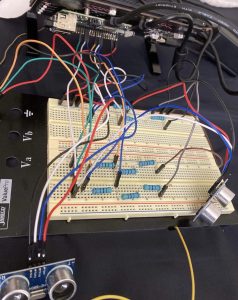
This week I’ve been working on the parking component — the ultrasound sensors for detecting which spots are taken. I designed the circuit to allow 3 ultrasound sensors be wired with the raspberry pi. My python script running on Pi can detect the distance measured by each ultrasound sensors with a resolution of ~4 cm. The threshold for detecting a car is when distance measured is <=40 cm, and this can be tuned later during testing. So far the 3 sensors is a proof of concept, and I can add more sensors in a similar way.
Personal Schedule
I’m on schedule.
Next deliverable
For next week, I hope to complete the navigation LED component at intersections. This will involve LED strips, Arduino, and Pi from the hardware side. Instructions from the server will need to be received by Pi and Pi will control Arduino to light up corresponding LED strips to show directions.