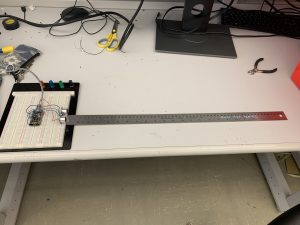
I made all the MicroPython scripts on the ESP8266 work! We have code that senses the distance from the ultrasonic sensor every 10 seconds for a minute, and then shuts down for two minutes. If the sensor detects something within 18 inches for at least ⅚ of the readings, then it returns that the spot is being blocked. We are able to post this to our AWS server using an MQTT client and have it stored in our database. Because one of our concerns was about testing the accuracy of the distance being reported by the sensors, I set up an informal test (as pictured below). It looks like our sensors are accurate to 250cm, which is far beyond what we actually need. Our batteries are still behind the receiving desk so Monday morning, we will plug in all of our modules and make sure we have everything looking good for the interim demo! Next week, I plan to make something for our sensors to rest on/attach to so they face the correct angle from the curb to a car. I am happy with the integration work we got done this week!