
- Accomplishments for the week:
- Worked on the final video/poster
- Wrote some graph visualizations for the GUI to give better telemetry to the emergency operator. Now, the GUI shows graphs of the battery life and linear/angular velocities.
- Progress:
- We’re focusing on putting final touches on Grubtub and finishing up the final documents!
- Next week’s deliverables:
- Final demo and report!
Michael’s Status Report for 4/3/2021
- Accomplishments for the week:
- Over the past week, I primarily worked to recover from the hack, and work with the team to reflash the Xavier and reinstall dependencies onto it.
- I consolidated the custom messages between the ground station and robot FSM into one custom message ROS package for all components to use in order to make integration much easier.
- I worked on the GUI based on my teammates’ usage feedback, combining the operator and user GUI into one.
- My teammates ran the operator GUI and used it to remote control the robot successfully, showing that the GUI, joystick code and camera feed work in production.
- Progress:
- Currently I am on-track.
- Next week’s deliverables:
- Double-check the ground station FSM based on my teammates’ robot FSM code/tests
- Help test the robot and help with mapping/vision, now that it can drive around.
Advaith’s Status Report for 3/13/2021
- Accomplishments
- Finished initial implementation of the local planner in simulation. The robot can avoid obstacles while still going through waypoints
- Assembled robot base hardware.

- Helped test the motors and motor controller
- Tested the GPS sensor’s raw data output on campus sidewalks

- This looks promising, as GPS is usually accurate to 3-5m. These data are within the sidewalks most of the time, and I think combining this with wheel odometry and IMU data can lead to accurate localization.
- Finished initial implementation of the local planner in simulation. The robot can avoid obstacles while still going through waypoints
- Schedule Progress
- We are on schedule for our project. We got the parts and have made good progress this week on our deliverables
- Deliverables for Next Week
- Run the localization algorithm independently using the IMU, GPS, and camera
- Integrate motor controller using UART
- Fine tune the collision avoidance algorithm.
Team Status Report for 3/6/2021
- This week was spent choosing parts and finalizing the design
- Current Risks and Mitigation
- We iterated on the design several times, and decided that choosing motors that could carry the 2kg payload will require higher end motor controllers and would violate the budget.
- We decided to relax the requirement to travel on slopes on campus, and focused on flat areas only. This way, we could bump down our motor specs and meet the budget constraint.
- Torque/motor = 0.5*Fr = 0.5*mgkr = 6.585 kg*cm
- RPM = (60*v) / (π*2r) = 139.2 rpm
- After finishing an initial design of a custom chassis, we decided to keep it simple and use a premade chassis. This will save a bit of money and save a lot of time that can be spent polishing our software.
- Our TA brought up that visual SLAM may not work well outdoors. We mitigated this by adding an LED ring light to our design. (will be presented in design presentation)
- Changes to System Design
- We’ve decided on using a premade chassis.
- Our campus travel requirement has been relaxed, specified in the above section.
- Schedule Changes
- No changes to our schedule this week.
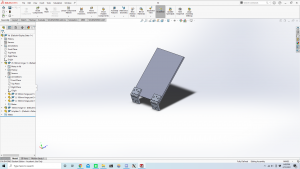
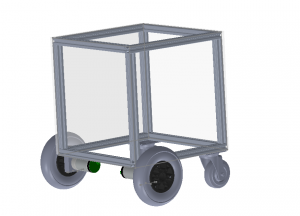
- Progress Pictures
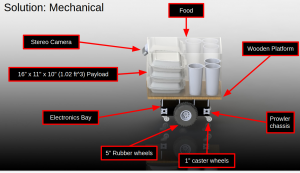
- This is Advaith’s CAD rendering of the new robot model using a premade prowler chassis, a wooden platform and a plastic holding device.
Advaith’s Status Report for 3/6/2021
- Accomplishments
- This week was spent really finishing the design and making changes to the requirements. We spent a majority of the time massaging the budget constraint and choosing parts that would satisfy it.
- Performed calculations for parts finalizing
- Finalized the CAD design and finished the BOM for the chassis
- Ordered all the parts on our BOM
- Finished the design presentation and have practiced
- Schedule Progress
- We are on schedule for our project. We ordered parts and they will be arriving by the end of next week.
- While we wait for parts we will begin to build out the software systems in simulation.
- Deliverables for Next Week
- Finish proof of concept for collision avoidance algorithm
- Finish the design presentation and practice giving it using the feedback from the last presentation
Advaith’s Status Report for 2/27/2021
- Accomplishments
- Tested the SLAM algorithm on campus.



- Finalized the CAD design
- Tested out the SLAM algorithm under different lighting conditions
- Wrote a PD line following algorithm in ROS using Gazebo
- Installed ROS on the Xavier with Michael
- Brought the IMU into ROS using pyserial.
- Schedule Progress
- We are on schedule for our project. We will be working on the Design Presentation in the following week and ordering parts.
- Deliverables for Next Week
- Finalize the parts list and order parts
- Begin working on the collision avoidance algorithm
- Finish the design presentation and practice giving it using the feedback from the last presentation.
Team Status Report for 2/20/2021
- Current Risks and Mitigation
- There is a risk that the WiFi on campus will not be consistent enough for our latency requirements. One contingency plan we have is to place a cellphone with a hotspot onboard the robot if the campus WiFi is not satisfactory. But this likely has implications for our ROS network since it would traditionally run in a local area network.
- Another risk is that localization algorithms may not work on campus. A mitigation plan is to test building a map on campus using an Intel Realsense before ordering parts, so we can finalize the correct sensor modalities. Contingency plan is to use fiducial markers.
- Changes to System Design
- Changed our design from 2 motors per driver to 1 motor per driver based on feedback from Prof. Kim. Using multiple motors on a driver would make accounting for any minor differences between motors very difficult.
- Decided on WiFi over LTE as our target for low-level communication protocol based on the suggestion from Prof. Kim that it is simpler to integrate into our robot.
- Schedule Changes
- No changes to our schedule this week.
- Progress Pictures
Hello world!
GrubTub will save your life in a snowstorm. GrubTub will make sure you get those gains. GrubTub will revolutionize the campus food delivery industry.