- Accomplishments
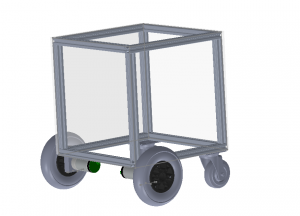
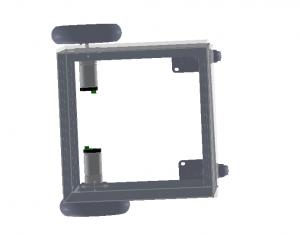
- This week, I worked on the CAD model for our robot. I am using Solidworks and bringing in models of motors, wheels, and 8020 aluminum rods to get a better spatial idea of our robot design. This will help us plan for materials and make it easier to change our design based on our requirements.
- I tested RTABMAP using an Intel Realsense camera using ROS. This is to test if it is a viable algorithm for our project. These tests should be done before buying parts, as the perception sensor is a significant investment.
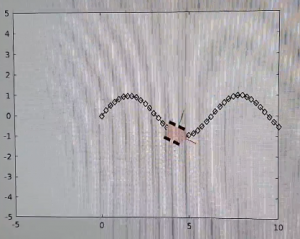
- I tested a basic Pure Pursuit controller in MATLAB with simulated differential drive robot.
- Worked with team on Proposal Presentation
- This week, I worked on the CAD model for our robot. I am using Solidworks and bringing in models of motors, wheels, and 8020 aluminum rods to get a better spatial idea of our robot design. This will help us plan for materials and make it easier to change our design based on our requirements.
- Schedule Progress
- We are on schedule for our project. We have completed the majority of the Proposal Presentation.
- Deliverables for Next Week
- I wish to complete the CAD model with all boards, actuators, and sensors so that we can finalize our BOM.
- Full testing of perception algorithms including ORBSLAM, RTABMAP, and HectorSLAM
- Bring the IMU into ROS
- I have a Bosch IMU that I want to test using ROS
- Involves getting the driver running through a Teensy, then writing a ROS wrapper node.
- Write a basic waypoint following robot in ROS using a simulated robot
- Will shed some light on the controls aspect of the project

Carnegie Mellon ECE Capstone, Spring 2021 | Michael Li, Sebastian Montiel, Advaith Sethuraman