- Accomplishments for the week:
- Integrated Kalman filter to work in 3D and tested on live data: Kalman 3D
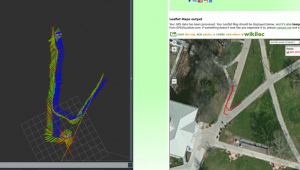
- Debugged the GPS localization on campus and took datasets for analysis
- Below left is the GPS readings integrated with IMU/wheel odometry. On right is the raw GPS data. This is only one trial but we need to retry this when weather permits.
- Modified the local planner with a new get_next_subgoal function
- Progress:
- We have a lot of integration to do during this last week
- We need to get the localization up and running soon and perform a few basic waypoints on campus
- We must pray to the robot gods for a smooth finish for this project
- Next week’s deliverables:
- Robot drives itself with global waypoints
- Pedestrian data association and tracking
- Integrate robot state machine and local planner

Carnegie Mellon ECE Capstone, Spring 2021 | Michael Li, Sebastian Montiel, Advaith Sethuraman