- This week was spent choosing parts and finalizing the design
- Current Risks and Mitigation
- We iterated on the design several times, and decided that choosing motors that could carry the 2kg payload will require higher end motor controllers and would violate the budget.
- We decided to relax the requirement to travel on slopes on campus, and focused on flat areas only. This way, we could bump down our motor specs and meet the budget constraint.
- Torque/motor = 0.5*Fr = 0.5*mgkr = 6.585 kg*cm
- RPM = (60*v) / (π*2r) = 139.2 rpm
- After finishing an initial design of a custom chassis, we decided to keep it simple and use a premade chassis. This will save a bit of money and save a lot of time that can be spent polishing our software.
- Our TA brought up that visual SLAM may not work well outdoors. We mitigated this by adding an LED ring light to our design. (will be presented in design presentation)
- Changes to System Design
- We’ve decided on using a premade chassis.
- Our campus travel requirement has been relaxed, specified in the above section.
- Schedule Changes
- No changes to our schedule this week.
- Progress Pictures
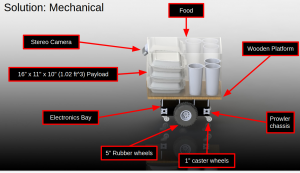
- This is Advaith’s CAD rendering of the new robot model using a premade prowler chassis, a wooden platform and a plastic holding device.

Carnegie Mellon ECE Capstone, Spring 2021 | Michael Li, Sebastian Montiel, Advaith Sethuraman