Aditi’s Update 2/23
This week we received the components, including the Roomba, the Rapsberry Pi, the lidar and the camera module.
The RPI did not come with an SD card, so we had to find one and install the OS onto it. I managed to get one from ideate, and we placed an order for an SD card.
Additionally, we discovered that we received a Roomba 1, which was released in 2007 has far less documentation and support than the Roomba 2. We decided to place an order on Amazon for the Roomba 2.
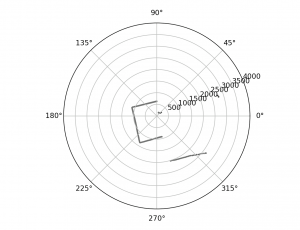
Since the raspberry pi did not have an OS installed, I had to test out the RPlidar on my macbook. This took some troubleshooting, because the addresses of USB ports I connected the RPLidar were not discoverable on my mac until I installed this driver (https://www.silabs.com/products/development-tools/software/usb-to-uart-bridge-vcp-drivers). I was however able to get it working in the end, and generated this point cloud image using a sample python program. I am happy with this result, and it seems like this fill fit our purposed for LSLAM.
Next week, I hope to test out the Roomba as well as the camera module, and get ROS set up on the Raspberry Pi.