Introduction and Project Summary
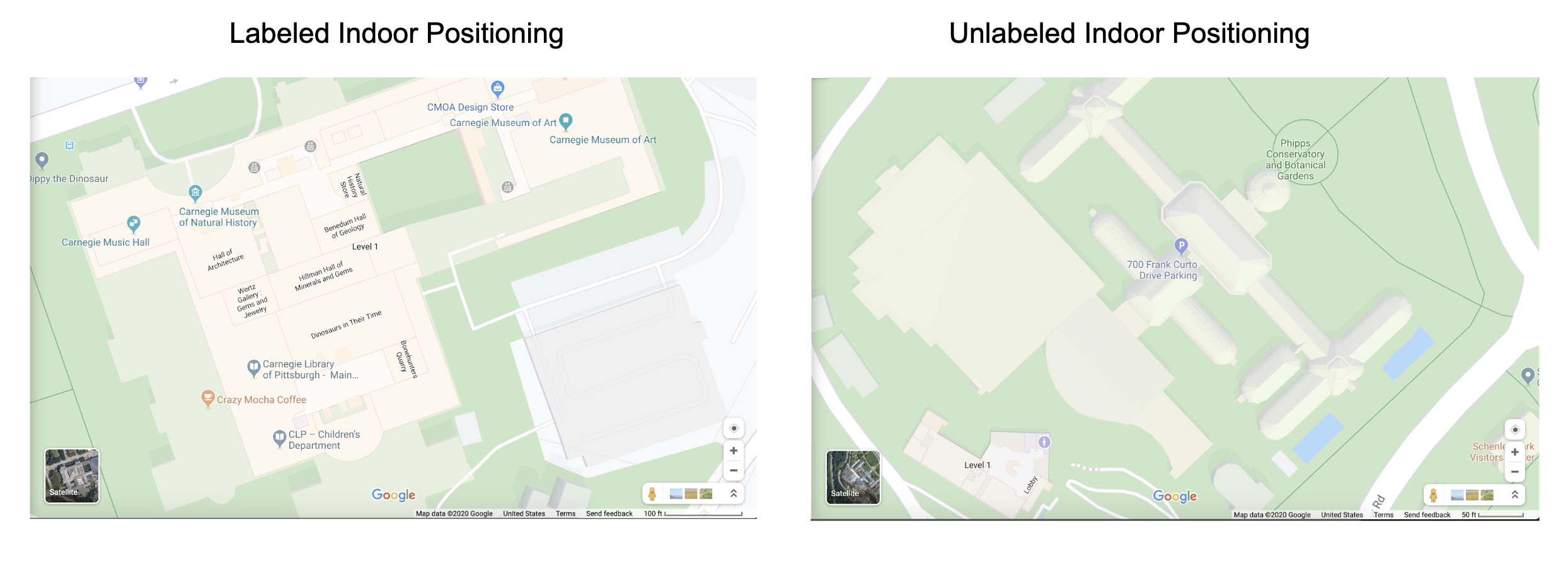
Google Maps lacks accurate and comprehensive indoor positioning information. Businesses and establishments that upload their own floor plans are able to show specific details on indoor locations. However, most buildings do not have this information available online, making it difficult for visitors to navigate indoors.
The Robotic Indoor Plotting project will autonomously generate indoor floor plans, while labeling room descriptors and dimensions. When placed indoors, the robot will explore the space, creating a 2D map using built-in obstacle detection sensors, an external scanning Lidar sensor, and computer vision detection algorithms. After traversing the indoor space, the robot will synthesize information into a readable format for the user to analyze on a web application. Since the data will be stored, the user can perform repeated scans more efficiently to update indoor positioning in the future.