What we plan to build.
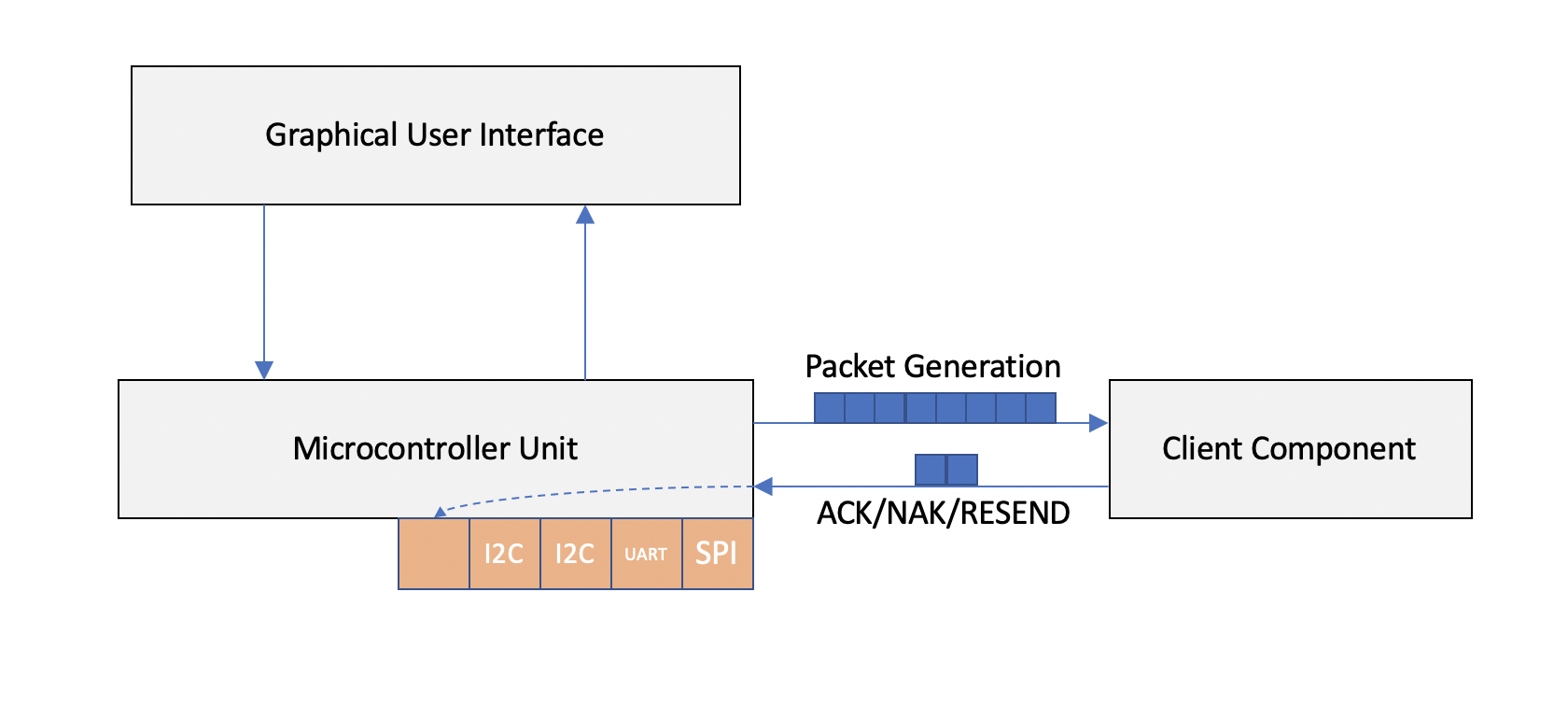
Our goal is to build a standard protocol to maintain data integrity among computing components like UART, I2C, and SPI in space. Because of space’s radiation and other various moon effects, the data that the moon rover receives and collects may be unexpectedly altered and undetected. We plan to have fall-back and foolproof method for this data transfer so that important and expensive data isn’t lost.
Our team is working in conjunction with CubeRover, Carnegie Mellon’s Moon Rover project, to help achieve this goal.

What our design goals are.
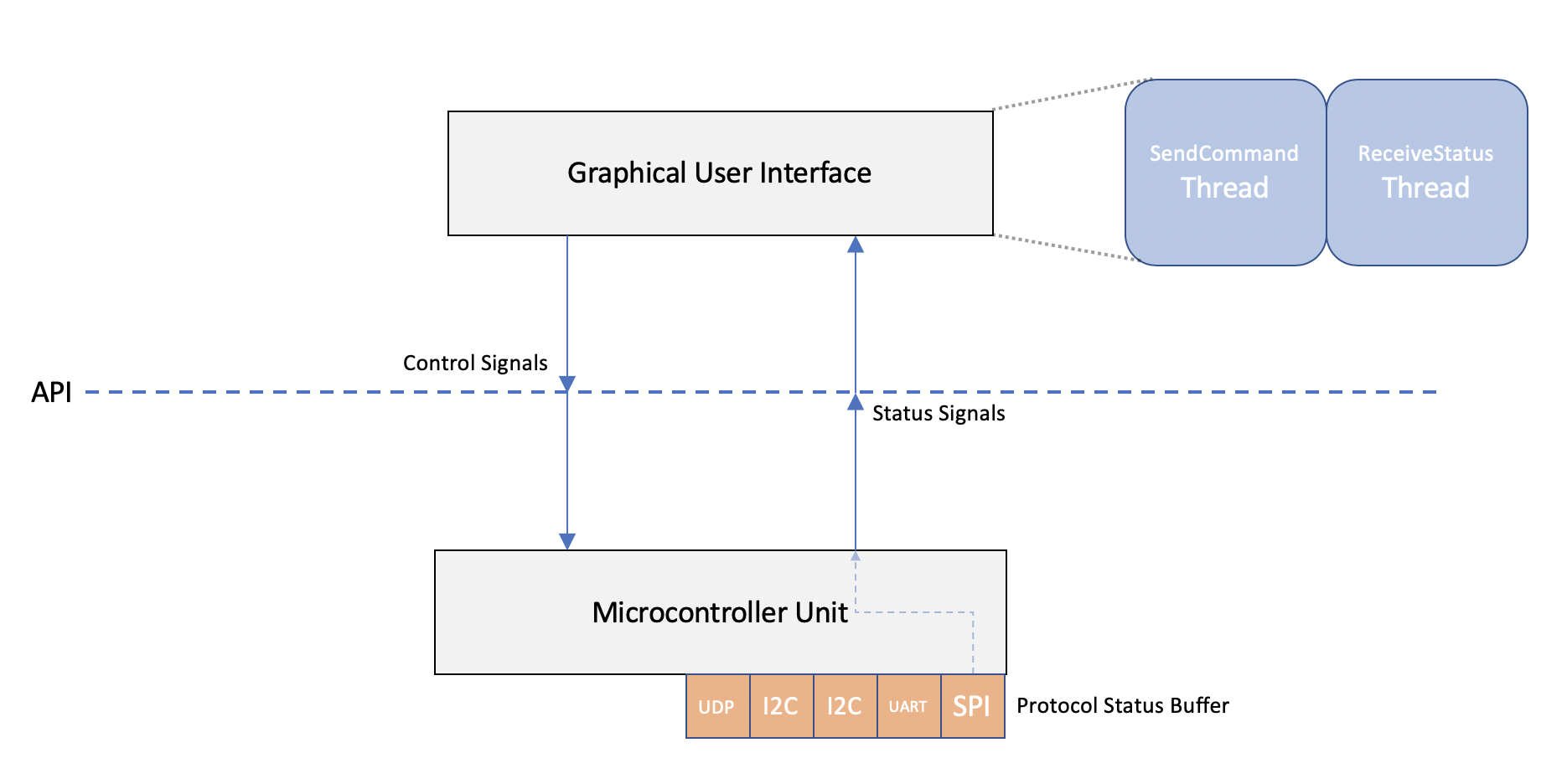
Our design goal is to have a modular system in place both for testing and verification. Our goal is to simulate the radiation through the use of a microcontroller, that will both unit test each component and allow for pass-through calling between components. Since energy and power are limited on the rover, we are maintaining low-energy and high-efficiency error detection and error correction. We will provide a seamless User Interface such that anybody should be able to manipulate the radiation simulation based on each protocol that the rover is using.
What’s cool and unique about the project.
Our project is possibly going to the moon- probably the only capstone project that will be going to the moon. Additionally, our project is special and unique because with our project, CubeRover will be able to successfully verify the data that it receives and transmits from the moon; without it, the data that it collects may inaccurate without users knowing. Moreover, the potential effects that moon radiation will have is unpredictable since error detection and handling on the moon is an uncommon issue for most devices. Having to think of every corner case and scenario that might happen before we eventually send our code to space will push us to our limit of how much we can plan ahead.