

This week, we partook in demos, which was split up between two main subsections. We had the software component, which showcased the depth camera and the python script that I wrote. We also had the firmware and hardware component, which tested the actuators pushing to max distance. Because our Raspberry Pi did not work before demos, I had to make use of my Intel NUC in order to get our script running and to be able to showcase the work on the software side.
After demos, I was in charge of moving the script to the Raspberry Pi, just so that we won’t have to make use of the Intel NUC in the future. I am also in charge of the UART communication between the RPI and the STM32. Additionally, I am in charge of the reset mechanism, and I drew out plans to get the reset mechanism working. Here is my planned diagram: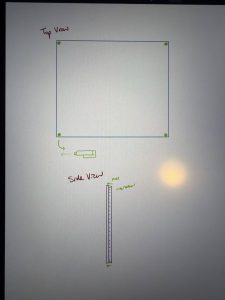
As we move towards Thanksgiving break, we are hoping to be able to assemble most of the parts and have a fully working product in the next few weeks.
For the verification system for the software components, we need to make sure that the depth camera is properly calibrated and can display images clearly or at least get enough details to output on a pin board. We will do a bunch of user tests to verify that the image that is outputted is indeed visible. This will be done specifically by asking random people if they can see images are visible, given a diagram of pixels that are shaded in.