Progress
- Performed and finished bluetooth latency test.
- Began user feedback tests for use-case requirements.
- Integrated haptic feedback on the glove.
- Debugging backwards movement on the Kar.
Unit tests
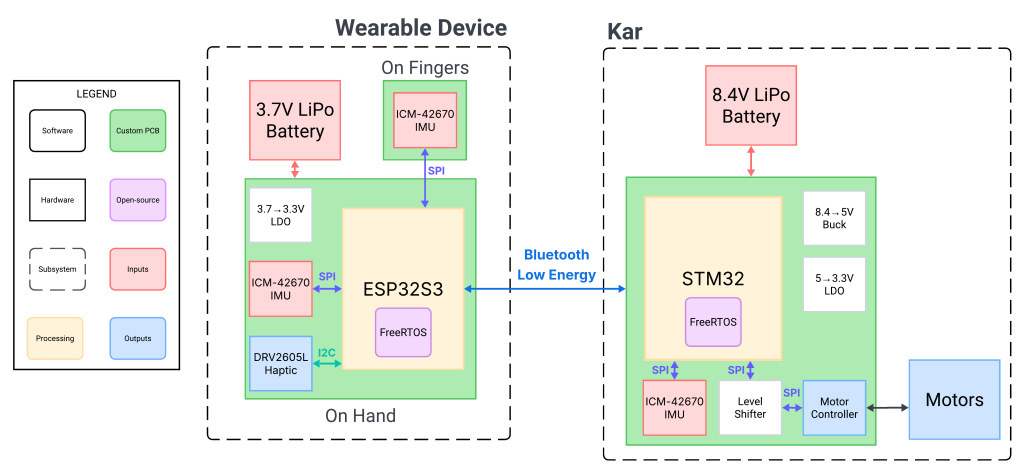
- PCB functionality: Verified power rails, continuity, and component bring-up. Fixed solder mask and test-point issues discovered during initial probing.
- Servo: Tested PWM control and steering response. Noted slight mechanical nonlinearity and added angle clamping in software.
- Motors and ESC: Checked throttle ramping and stability under load. Soft-start curve adjusted to avoid current spikes.
- IMU: Evaluated noise, drift, and gesture responsiveness. Improved filtering and thresholds after detecting inconsistent finger-IMU readings.
- Haptic Motor Controller: Confirmed vibration patterns and intensity. Rebalanced waveform strengths to improve clarity of subtle feedback.
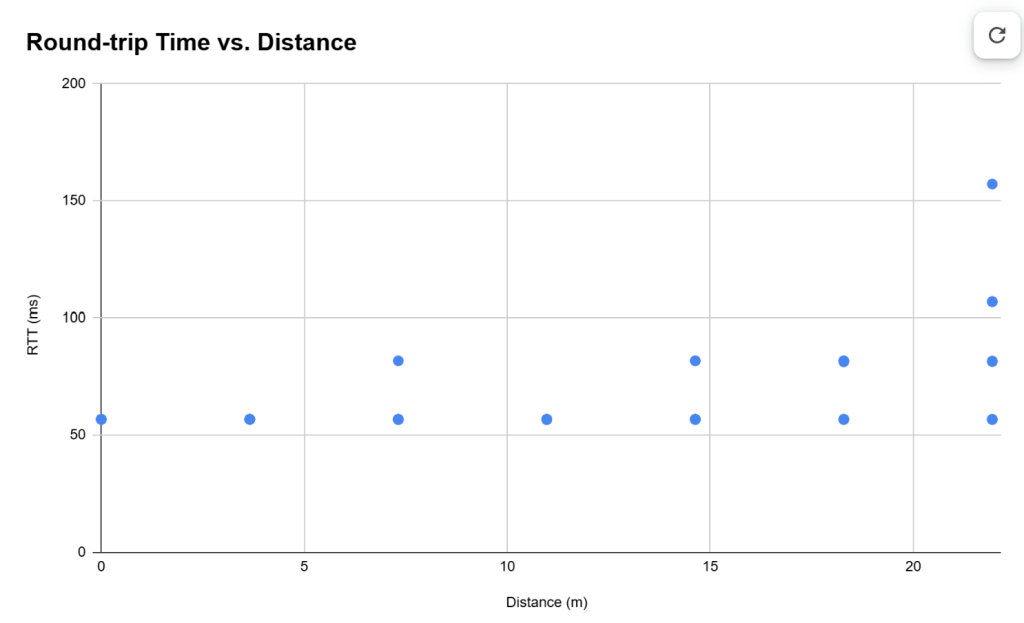
Bluetooth & Latency Test
Measured ESP32 to STM32 communication delay by logging timestamps when packets were sent and when they were received, then plotting the round-trip time across varying distances. Findings showed that at increasing data ranges, RTT would experience latency spikes, leading us to slightly refine packet size and filtering to keep end-to-end delay within requirements.
overall system test
Evaluated the complete driving experience through extensive user-feedback testing, including navigating obstacle setups, gesture-control trials, and haptic-feedback evaluations. User responses helped tune gesture sensitivity and adjust control mappings.