
Accomplished
This week, I worked with Enrique to set up FreeRTOS on the NUCLEO-WB55RG board that we will be primarily using for kar prototyping. We followed a tutorial that I linked two weeks ago, however instead of setting up FreeRTOS in VSCode which I worked on last week, we decided to set it up in STM32CubeIDE. After setting up LEDs, redirecting printf to Serial Wire View (SVW), and FreeRTOS, we were successfully able to create two tasks where one toggles an LED and the other prints to the serial monitor. We decided to stick with using the ST IDE for setting up the environment because there are more resources online using this setup, and we will probably stick with using the ST IDE for the remainder of the STM32 development.
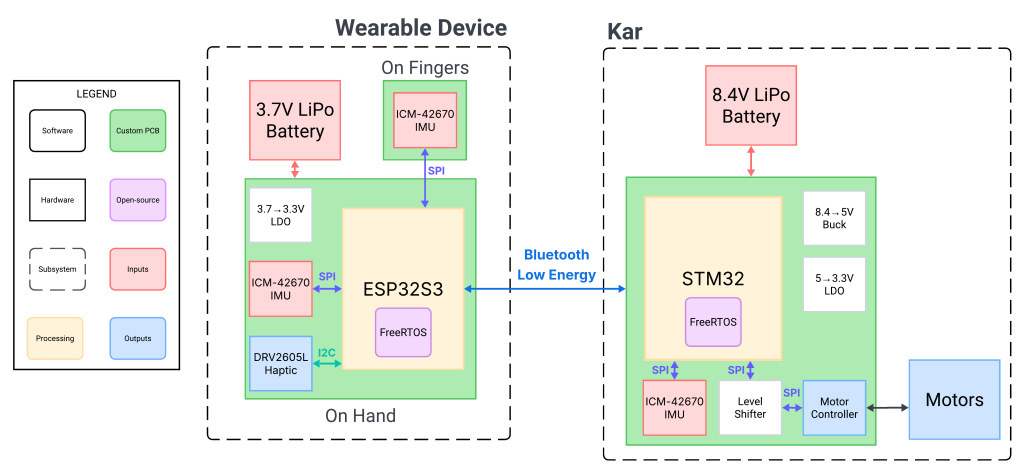
I also worked on a more complete architecture diagram of our system that was used in the design presentation. For this diagram, I communicated with Nick on where the hardware is and communicated with Enrique on what the communication protocols look like between components.
Progress / Schedule
I am a bit behind schedule, since I was supposed to finish FreeRTOS setup for the STM32 last week and finish up researching IMU algorithms this week. Since I have just received the ESP32-S3 microcontroller and found an additional MPU6050 that I can use, I will focus on getting the IMU reliable, accurate, and consistent. I have updated the Gantt chart, and believe that I can still catch up with my goal of finishing up the IMU subsystem by next week.
Deliverables / Next Steps
Next week, I will:
- learn how to use the ESP32-S3 for IMU.
- research the FIR and Kalman filters for the IMU.
- collect measurements from the IMU and process them through filters.
- set up FreeRTOS on my own Nucleo STM32 (not the NUCLEO-WB55RG) on STM32CubeIDE since it looks like we will be doing all development on there.